




يعد محرك السائر 28BHIJ-48 محركًا شهيرًا وبأسعار معقولة في كثير من الأحيان في مشاريع الإلكترونيات DIY. إلى جانب لوحة برنامج التشغيل ULN2003 ، يعد اختيارًا ممتازًا للتطبيقات التي تتطلب حركة دقيقة ، مثل الروبوتات ومزدلات الكاميرا والأتمتة المنزلية. سوف يرشدك هذا البرنامج التعليمي من خلال إعداد ومراقبة محرك 28byj-48 السائر مع Arduino.
ماذا ستحتاج
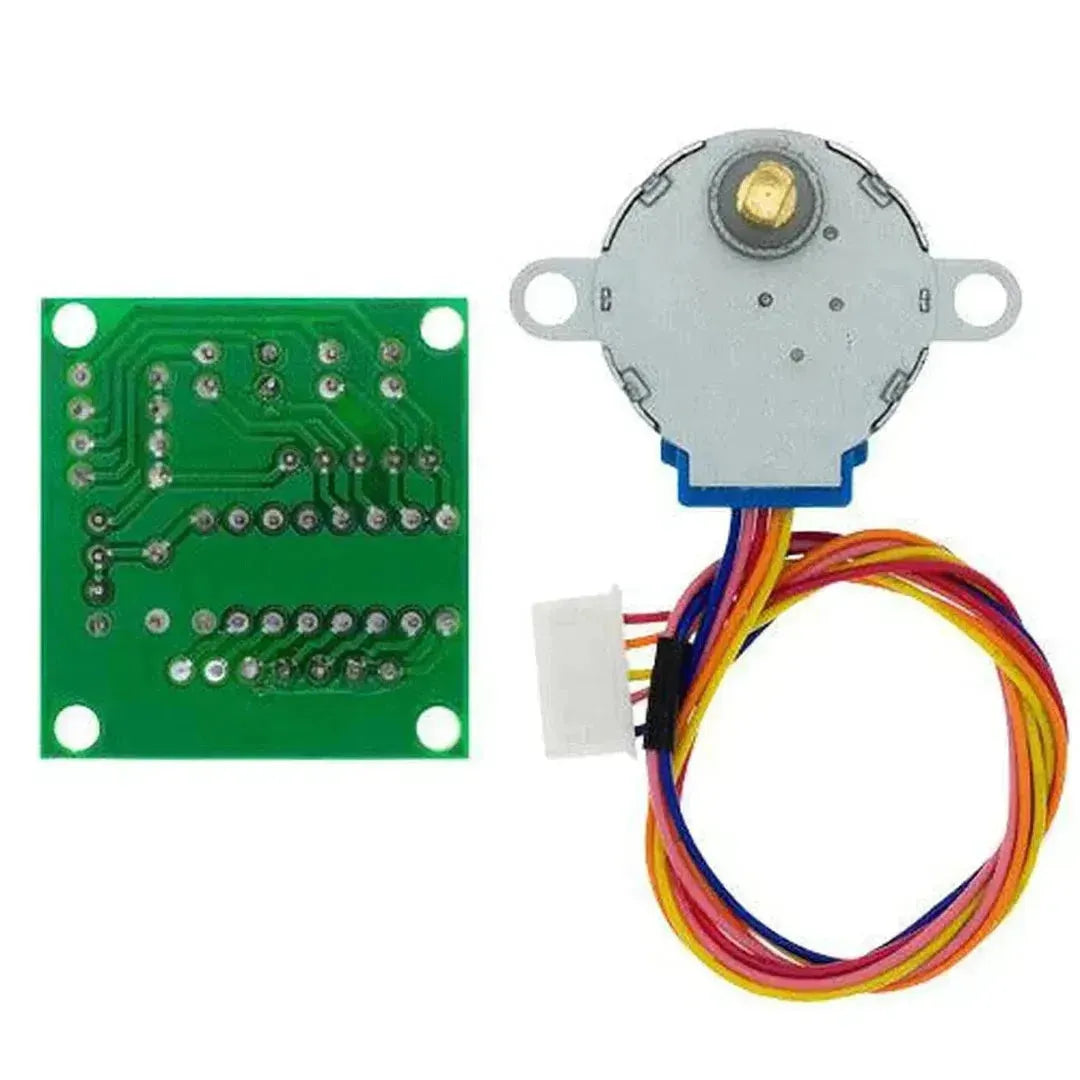
- 28BYJ-48 Stepper Motor
- ULN2003 لوحة السائق
- لوحة Arduino (على سبيل المثال ، UNO ، Mega ، Nano)
- الأسلاك الطائر
- لوح (اختياري)
- جهاز كمبيوتر مع Arduino IDE مثبت
الخطوة 1: فهم المكونات
28BYJ-48 Stepper Motor
- 28BYJ-48 عبارة عن محرك سائر من 4 طور و 5 أسلاك مع نسبة الحد من التروس تبلغ حوالي 1:64 ، مما يجعله دقيقًا وموثوقًا.
ULN2003 لوحة السائق
- ULN2003 هي لوحة قيادة مصممة خصيصًا لمحرك 28BYJ-48. ويشمل مصابيح LED للإشارة إلى المرحلة النشطة للمحرك وتبسيط الاتصالات مع Arduino.
الخطوة 2: توصيل ULN2003 إلى Arduino
-
قم بتوصيل محرك 28BYJ-48 بلوحة DRIVER ULN2003. يناسب موصل المحرك مباشرة مع الرأس المسمى "في" على السبورة.
-
استخدم أسلاك الطائر لتوصيل لوحة تشغيل ULN2003 بأردوينو على النحو التالي:
| ULN2003 دبوس | دبوس أردوينو |
|---|---|
| in1 | دبوس 8 |
| in2 | دبوس 9 |
| in3 | دبوس 10 |
| in4 | دبوس 11 |
| VCC | 5V |
| GND | GND |
الخطوة 3: تثبيت مكتبة السائر
يتضمن Arduino IDE مكتبة مدمجة للتحكم في محرك السائر.
- افتح Arduino IDE.
- اذهب إلى رسم > تشمل المكتبة > السائر.
الخطوة 4: تحميل الرمز
فيما يلي رمز مثال أساسي للتحكم في محرك السائر:
#include <Stepper.h>
// Define the number of steps per revolution for the 28BYJ-48 motor
#define STEPS_PER_REV 2048
// Initialize the Stepper library on pins 8, 9, 10, and 11
Stepper stepper(STEPS_PER_REV, 8, 10, 9, 11);
void setup() {
stepper.setSpeed(15); // Set motor speed (in RPM)
Serial.begin(9600);
Serial.println("28BYJ-48 Stepper Motor Test");
}
void loop() {
Serial.println("Moving Forward");
stepper.step(STEPS_PER_REV); // Move one full revolution forward
delay(1000);
Serial.println("Moving Backward");
stepper.step(-STEPS_PER_REV); // Move one full revolution backward
delay(1000);
}
الخطوة 5: اختبار الإعداد
- قم بتوصيل Arduino بجهاز الكمبيوتر الخاص بك عبر USB.
- افتح Arduino IDE وحدد الصحيح سبورة و ميناء تحت أدوات قائمة طعام.
- قم بتحميل الرمز إلى Arduino بالنقر فوق رفع.
- بمجرد تحميل الكود ، يجب على محرك السائر تدوير ثورة كاملة إلى الأمام ثم إلى الخلف مرارًا وتكرارًا.
السيطرة المتقدمة مع التسارع
لتحكم أكثر سلاسة وأكثر دقة ، يمكنك استخدام Accelstepper مكتبة بدلاً من مكتبة السائر المدمجة. إليك مثال:
#include <AccelStepper.h>
// Define the motor interface type
#define HALFSTEP 8
// Initialize the AccelStepper library
AccelStepper stepper(HALFSTEP, 8, 10, 9, 11);
void setup() {
stepper.setMaxSpeed(1000); // Set maximum speed
stepper.setAcceleration(500); // Set acceleration
stepper.setSpeed(200); // Set initial speed
}
void loop() {
stepper.runSpeed(); // Continuous rotation
}
استكشاف الأخطاء وإصلاحها
- المحرك لا يتحرك: تحقق من جميع الاتصالات وتأكد من تحديد المسامير الصحيحة في الكود.
- الحركة الخاطئة: تحقق من أن مصدر الطاقة الخاص بالمحرك كافٍ وأن الكود يطابق الإعداد الخاص بك.
- عزم الدوران المنخفض: 28BYJ-48 ليس محركًا عاليًا. تأكد من عدم التحميل الزائد.
تطبيقات 28byj-48 سهوب محرك
- انزلاقات الكاميرا
- الأسلحة الآلية
- الستائر الآلية
- آليات الطابعة ثلاثية الأبعاد
خاتمة
لقد نجحت في إعداد وسيطرة محرك السائر 28BYJ-48 مع برنامج تشغيل ULN2003 و Arduino. هذا المحرك بأسعار معقولة وموثوقة مثالية لمشاريع DIY المختلفة. جرب سرعات وخطوات وطرق التحكم المختلفة لجعل مشاريعك أكثر ديناميكية!



































































































































