





The MCP2515 is a CAN (Controller Area Network) bus module widely used for automotive and industrial communication. It enables Arduino to interface with CAN-based systems to send and receive data efficiently. This tutorial will guide you through setting up and using the MCP2515 module with Arduino.
What You Will Need
- MCP2515 CAN Bus Module
- Arduino Board (e.g., Uno, Mega, Nano)
- CAN-Bus Compatible Device or Another MCP2515 Module
- Jumper Wires
- Breadboard (optional)
- A computer with the Arduino IDE installed
Step 1: Understanding the MCP2515 Module
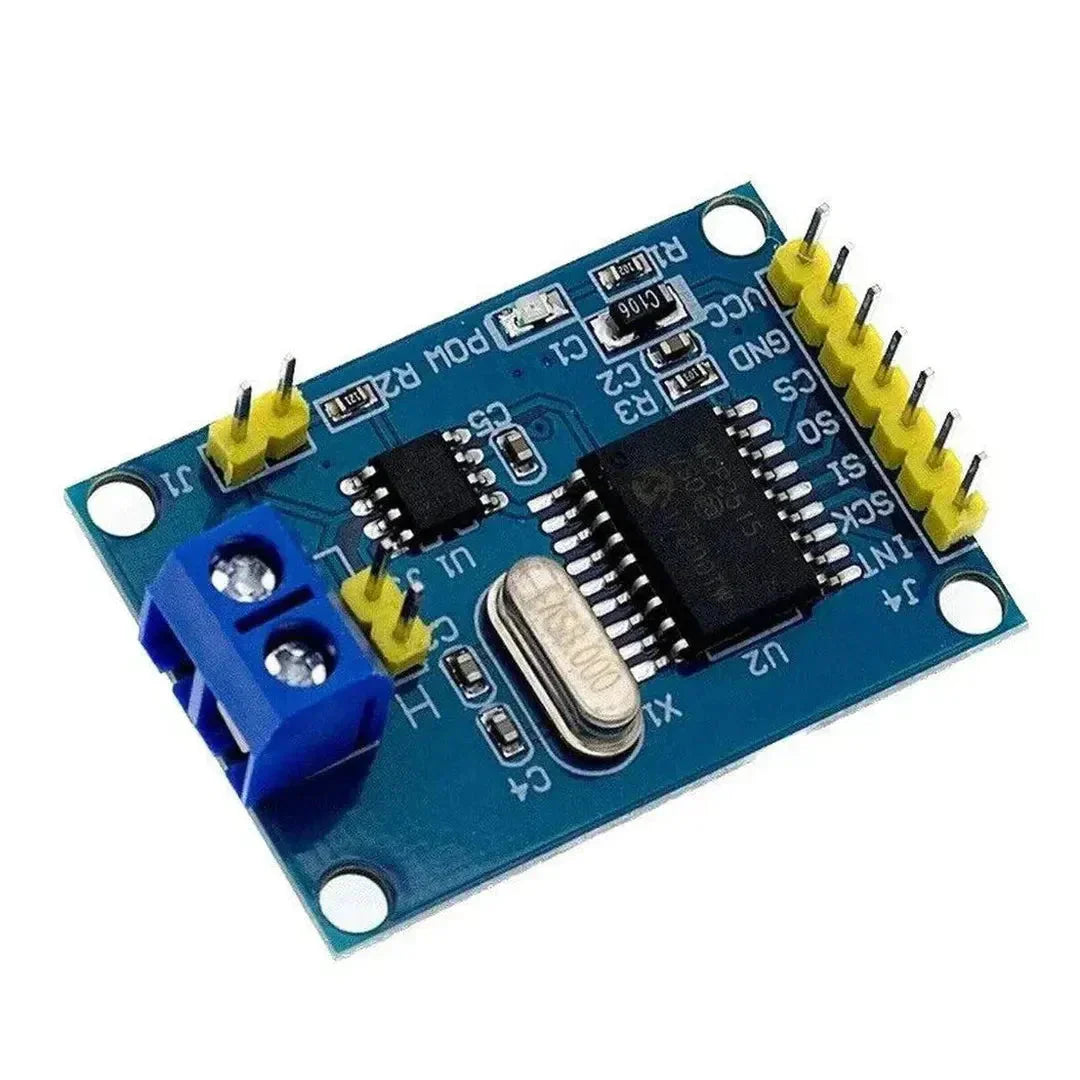
The MCP2515 module uses the MCP2515 CAN controller IC and TJA1050 CAN transceiver. The module communicates with the Arduino via the SPI interface.
MCP2515 Pinout
| Pin | Function |
|---|---|
| VCC | Power Supply (5V) |
| GND | Ground |
| CS | Chip Select |
| SO | SPI Data Output |
| SI | SPI Data Input |
| SCK | SPI Clock |
| INT | Interrupt Output |
Step 2: Wiring the MCP2515 to Arduino
Below is the wiring guide for connecting the MCP2515 module to an Arduino Uno:
| MCP2515 Pin | Arduino Pin |
|---|---|
| VCC | 5V |
| GND | GND |
| CS | Pin 10 |
| SO | Pin 12 |
| SI | Pin 11 |
| SCK | Pin 13 |
| INT | Pin 2 |
Note: For other Arduino boards, ensure the SPI pins correspond to your specific board’s pinout.
Step 3: Install the Required Library
The MCP_CAN library simplifies interaction with the MCP2515 module.
Steps to Install MCP_CAN Library:
- Open the Arduino IDE.
- Go to Sketch > Include Library > Manage Libraries.
- Search for "MCP_CAN" in the Library Manager.
- Click Install.
Step 4: Upload the Code
Transmitter Code (Sending Data on the CAN Bus):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
if (CAN.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully");
} else {
Serial.println("Error Sending Message");
}
delay(1000); // Send data every second
}
Receiver Code (Reading Data from the CAN Bus):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char len = 0;
unsigned char buf[8];
if (CAN.checkReceive() == CAN_MSGAVAIL) {
CAN.readMsgBuf(&len, buf);
unsigned long id = CAN.getCanId();
Serial.print("Message ID: 0x");
Serial.println(id, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
Step 5: Test the Setup
- Connect the MCP2515 module to your Arduino as described in Step 2.
- Upload the transmitter code to one Arduino and the receiver code to another Arduino.
- Connect the CAN_H and CAN_L pins of both MCP2515 modules to establish the CAN bus.
- Open the Serial Monitor on both Arduinos and set the baud rate to
115200. - On the receiver Arduino, you should see the messages sent by the transmitter Arduino.
Troubleshooting
- No data received: Check the CAN_H and CAN_L connections between the modules.
- Initialization failed: Ensure the SPI connections and CS pin match your setup.
- Erratic communication: Verify that both modules use the same baud rate (500 kbps in this example).
Applications of the MCP2515 CAN Bus Module
- Vehicle diagnostics (OBD-II)
- Industrial automation systems
- Robotics communication
- IoT devices with CAN bus networks
Conclusion
You’ve successfully set up the MCP2515 CAN bus module with Arduino for sending and receiving data. This module is incredibly versatile for applications requiring reliable communication over a CAN bus. Experiment with different message IDs and data payloads to explore its full potential!



































































































































