




Der 28BYJ-48 Stepper Motor ist ein beliebter, erschwinglicher Stepper-Motor, der häufig bei DIY-Elektronikprojekten verwendet wird. In Kombination mit der ULN2003 -Treiberplatte ist es eine ausgezeichnete Wahl für Anwendungen, die präzise Bewegungen erfordern, wie Robotik, Kamera -Schieberegler und Heimautomatisierung. In diesem Tutorial wird Sie durch die Einrichtung und Kontrolle des 28BYJ-48-Steppermotors mit Arduino eingerichtet und gesteuert.
Was Sie brauchen werden
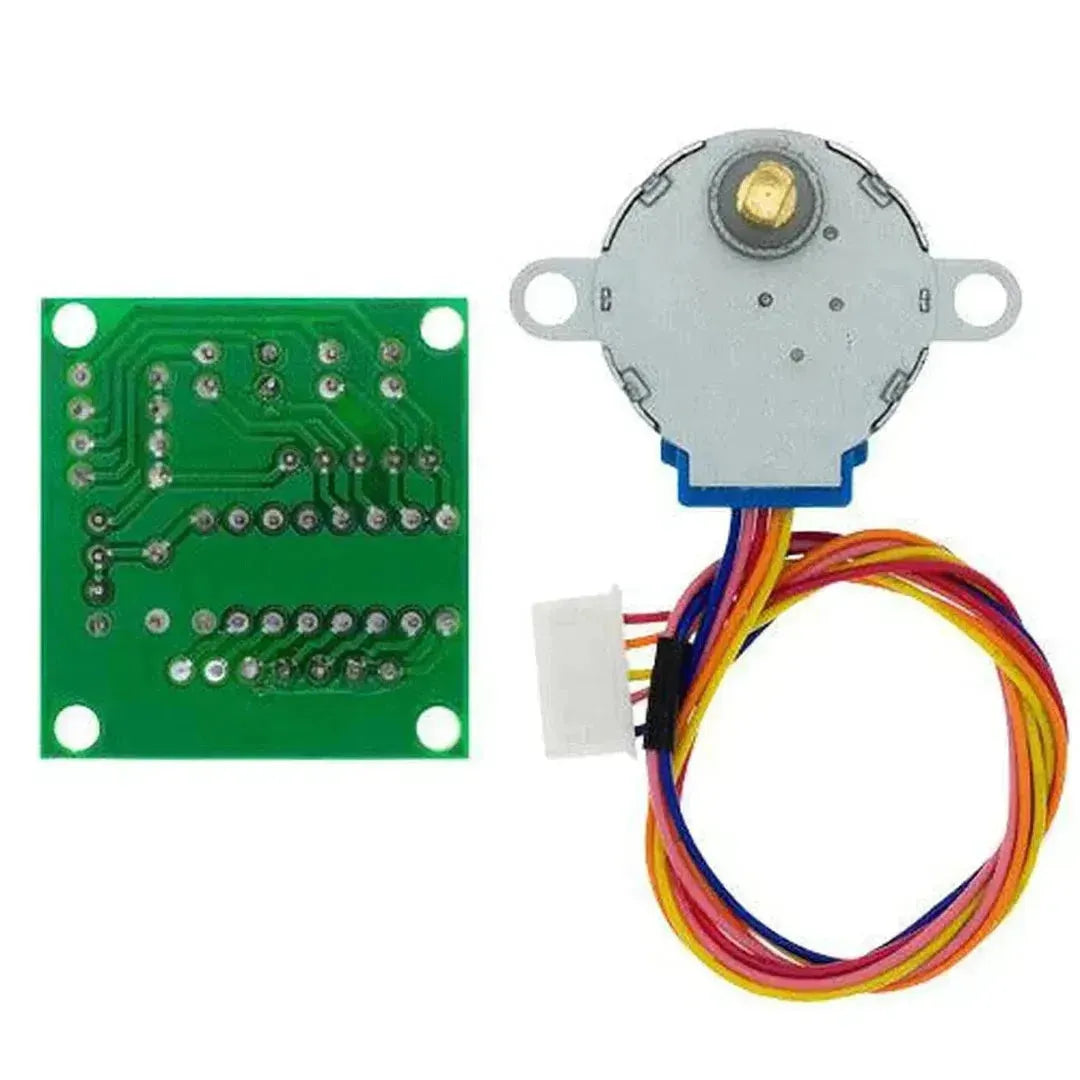
- 28BYJ-48 Stepper Motor
- ULN2003 TRAVER BOARD
- Arduino Board (z. B. Uno, Mega, Nano)
- Jumperdrähte
- Breadboard (optional)
- Ein Computer mit der Arduino -IDE installiert
Schritt 1: Verständnis der Komponenten
28BYJ-48 Stepper Motor
- The 28BYJ-48 is a 4-phase, 5-wire stepper motor with a gear reduction ratio of approximately 1:64, making it precise and reliable.
ULN2003 Driver Board
- The ULN2003 is a driver board designed specifically for the 28BYJ-48 motor. Es enthält LEDs, um die aktive Phase des Motors anzuzeigen, und vereinfacht die Verbindungen zum Arduino.
Schritt 2: Verkabelung des ULN2003 mit Arduino
-
Schließen Sie den 28BYJ-48-Motor an das ULN2003-Fahrerbrett an. Der Anschluss des Motors passt direkt in den mit "in" auf dem Brett gekennzeichneten Header.
-
Verwenden Sie Jumper -Drähte, um die ULN2003 -Fahrerplatte wie folgt an den Arduino zu verbinden:
| ULN2003 PIN | Arduino Pin |
|---|---|
| In1 | Pin 8 |
| In2 | Pin 9 |
| In3 | Pin 10 |
| In4 | Pin 11 |
| VCC | 5v |
| GND | GND |
Schritt 3: Installieren Sie die Stepper -Bibliothek
Die Arduino-IDE enthält eine eingebaute Bibliothek für die Stepper-Motorsteuerung.
- Öffnen Sie die Arduino -IDE.
- Gehen zu Skizzieren > Bibliothek einbeziehen > Stepper.
Schritt 4: Laden Sie den Code hoch hoch
Hier ist ein grundlegender Beispielcode zur Steuerung des Stepper -Motors:
#include <Stepper.h>
// Define the number of steps per revolution for the 28BYJ-48 motor
#define STEPS_PER_REV 2048
// Initialize the Stepper library on pins 8, 9, 10, and 11
Stepper stepper(STEPS_PER_REV, 8, 10, 9, 11);
void setup() {
stepper.setSpeed(15); // Set motor speed (in RPM)
Serial.begin(9600);
Serial.println("28BYJ-48 Stepper Motor Test");
}
void loop() {
Serial.println("Moving Forward");
stepper.step(STEPS_PER_REV); // Move one full revolution forward
delay(1000);
Serial.println("Moving Backward");
stepper.step(-STEPS_PER_REV); // Move one full revolution backward
delay(1000);
}
Schritt 5: Testen Sie das Setup
- Schließen Sie den Arduino über USB an Ihren Computer an.
- Öffnen Sie die Arduino -IDE und wählen Sie die richtige Auswahl Planke Und Hafen unter dem Werkzeuge Speisekarte.
- Laden Sie den Code durch Klicken in den Arduino hoch in den Arduino Hochladen.
- Sobald der Code hochgeladen ist, sollte der Schrittmotor eine volle Revolution vorwärts und dann wiederholt rückwärts drehen.
Erweiterte Kontrolle mit Beschleunigung
Für eine glattere und genauere Kontrolle können Sie die verwenden Accelstepper Bibliothek anstelle der eingebauten Stepper-Bibliothek. Hier ist ein Beispiel:
#include <AccelStepper.h>
// Define the motor interface type
#define HALFSTEP 8
// Initialize the AccelStepper library
AccelStepper stepper(HALFSTEP, 8, 10, 9, 11);
void setup() {
stepper.setMaxSpeed(1000); // Set maximum speed
stepper.setAcceleration(500); // Set acceleration
stepper.setSpeed(200); // Set initial speed
}
void loop() {
stepper.runSpeed(); // Continuous rotation
}
Fehlerbehebung
- Motor nicht bewegt: Überprüfen Sie alle Verbindungen und stellen Sie sicher, dass die richtigen Stifte im Code definiert sind.
- Unberechenbare Bewegung: Stellen Sie sicher, dass die Stromversorgung des Motors ausreicht und der Code mit Ihrem Setup entspricht.
- Niedriges Drehmoment: Der 28BYJ-48 ist kein High-Torque-Motor. Stellen Sie sicher, dass es nicht überladen ist.
Bewerbungen von 28BYJ-48 Stepper Motor
- Kamera -Schieberegler
- Roboterarme
- Automatisierte Jalousien
- 3D -Druckermechanismen
Abschluss
Sie haben den 28BYJ-48-Stepper-Motor mit dem ULN2003-Fahrer und Arduino erfolgreich eingerichtet und kontrolliert. Dieser erschwingliche und zuverlässige Motor ist perfekt für verschiedene DIY -Projekte. Experimentieren Sie mit unterschiedlichen Geschwindigkeiten, Schritten und Kontrollmethoden, um Ihre Projekte dynamischer zu gestalten!



































































































































