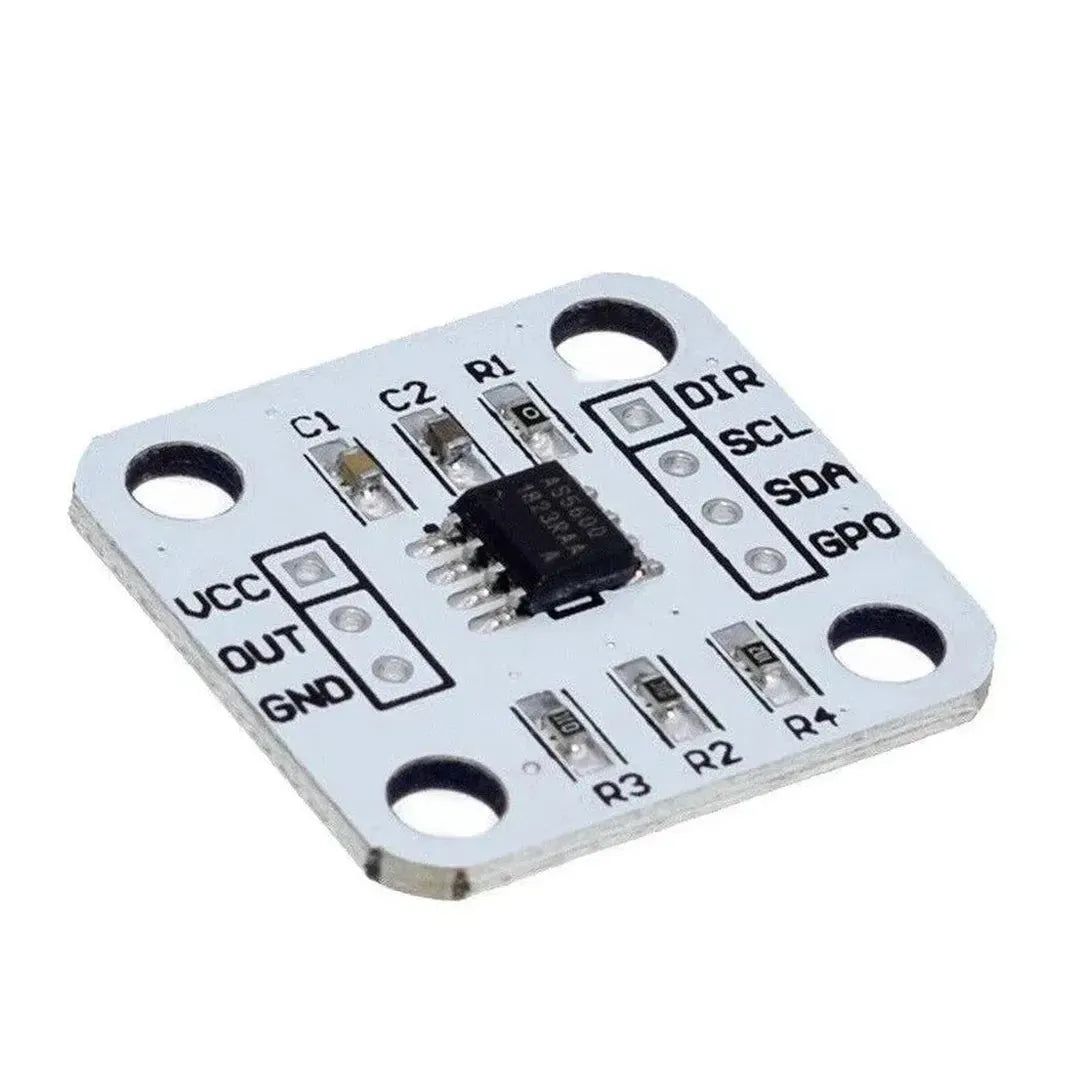



Der AS5600 ist ein präziser magnetischer Rotationscodierer, der Winkel mit einer Auflösung von 12 Bit messen kann. Es kommuniziert über I2C oder analoge Ausgabe und macht es ideal für Robotik-, Motorkontroll- und Positions -Erfassungsanwendungen. In diesem Tutorial führt Sie die Verbindung und Verwendung des AS5600 mit Arduino.
Was Sie brauchen werden
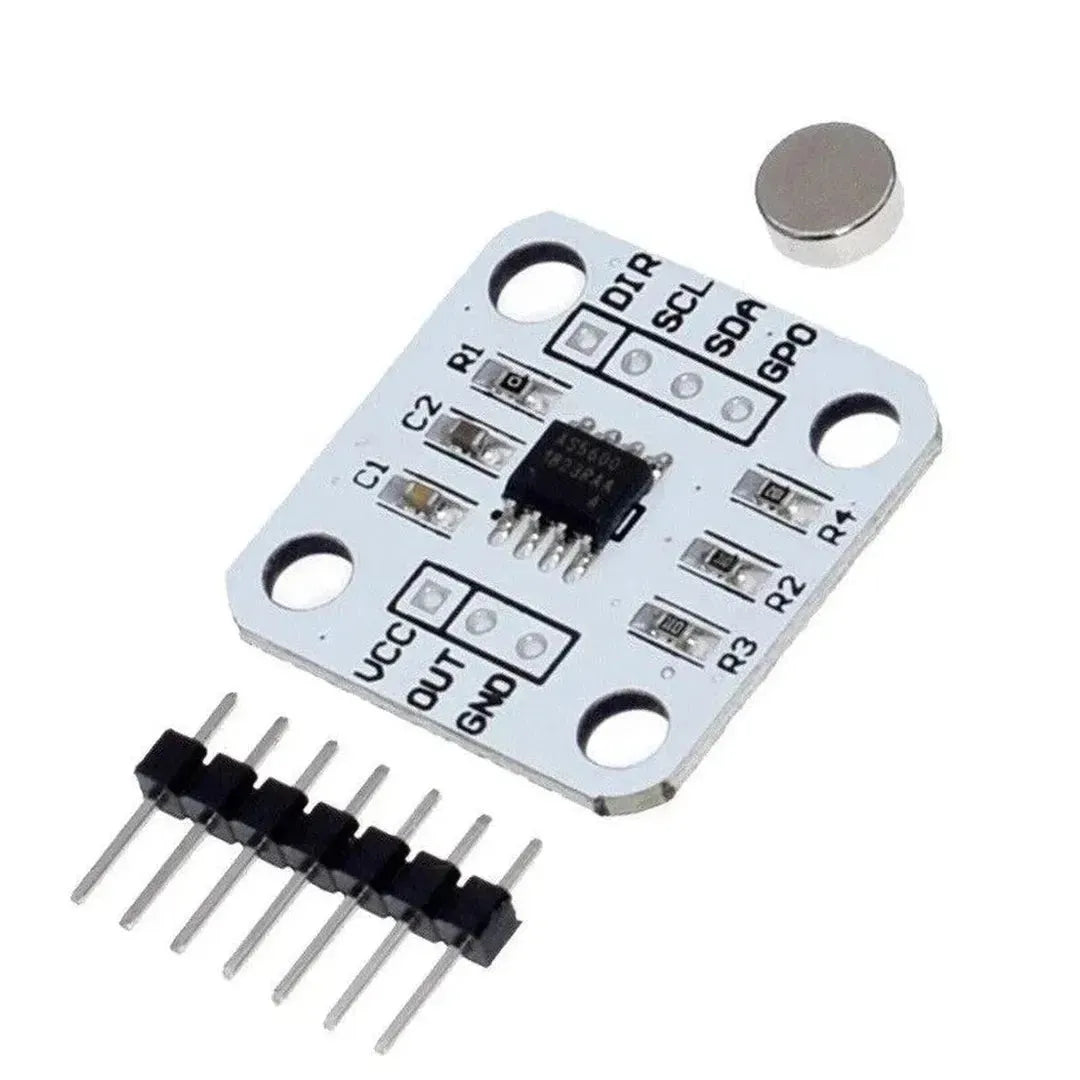
- AS5600 Magnetic Rotary Encoder -Modul
- Arduino Board (z. B. Uno, Mega, Nano)
- Breadboard- und Jumper -Drähte
- Ein Computer mit der Arduino -IDE installiert
Schritt 1: Verständnis des AS5600 -Moduls
Der AS5600 unterstützt beide I2C Und Analog Ausgänge. Im I2C -Modus liefert es hoch genaue Winkeldaten. Der analoge Modus gibt eine Spannung proportional zum Winkel aus.
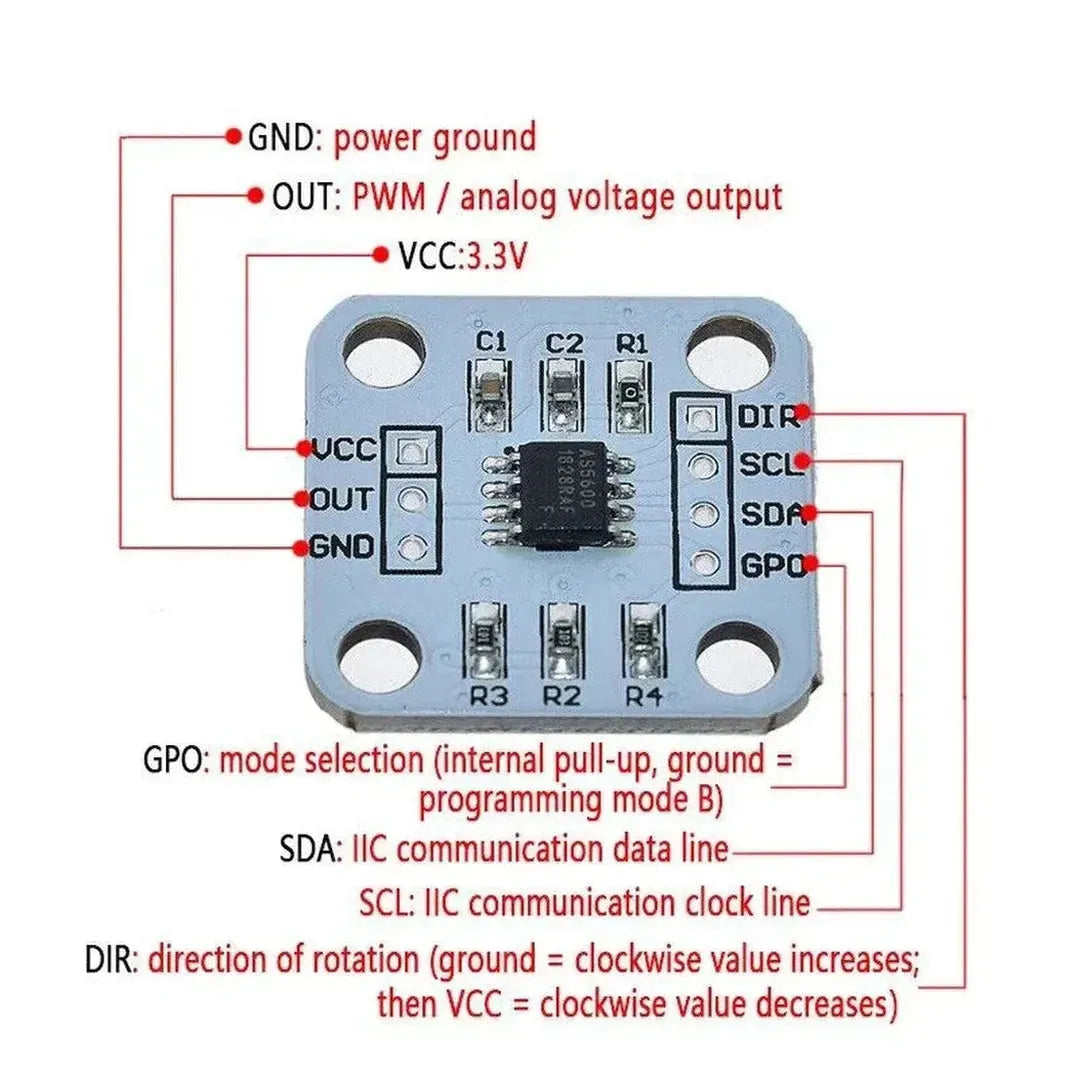
Pinout
| Stift | Funktion |
|---|---|
| VCC | Stromversorgung (3,3 V/5 V) |
| GND | Boden |
| SDA | I2C -Datenzeile |
| Scl | I2C -Uhr -Linie |
| AUS | Analogausgang (optional) |
| Dir | Richtungskonfiguration |
| MODUS | Ausgabemoduskonfiguration |
Notiz: Der
DIRPin konfiguriert die Drehrichtung und dieMODEPIN wählt zwischen I2C- oder Analogausgangsmodi. Für I2C verbinden sichMODEzu gnd.
Schritt 2: Verkabelung des AS5600 mit Arduino
I2C -Modus (Standard)
Verbinden Sie den AS5600 wie folgt mit dem Arduino:
| AS5600 PIN | Arduino Pin |
|---|---|
| VCC | 5v |
| GND | GND |
| SDA | A4 |
| Scl | A5 |
Notiz: Stellen Sie für andere Arduino -Boards sicher, dass Sie die richtigen I2C -Stifte verwenden.
Schritt 3: Installieren Sie die erforderliche Bibliothek
Um mit dem AS5600 zu vereinfachen, installieren Sie die "AS5600" -Bibliothek von GitHub oder dem Arduino Library Manager.
Schritte zu installieren:
- Öffnen Sie die Arduino -IDE.
- Gehen zu Skizzieren > Bibliothek einbeziehen > Bibliotheken verwalten.
- Suchen Sie nach "AS5600" und klicken Sie auf Installieren.
Schritt 4: Laden Sie den Code hoch hoch
Hier ist ein Beispielcode zum Lesen des Winkels vom AS5600 mit i2c:
#include <Wire.h>
#include <AS5600.h>
AS5600 encoder;
void setup() {
Serial.begin(9600);
Wire.begin();
if (!encoder.begin()) {
Serial.println("AS5600 not detected. Check connections.");
while (1);
}
Serial.println("AS5600 initialized.");
}
void loop() {
// Read the current angle in degrees
float angle = encoder.getAngle();
Serial.print("Angle: ");
Serial.print(angle);
Serial.println(" degrees");
delay(100); // Update every 100ms
}
Schritt 5: Testen Sie das Setup
- Schließen Sie den Arduino über USB an Ihren Computer an.
- Öffnen Sie die Arduino -IDE und wählen Sie die richtige Auswahl Planke Und Hafen unter dem Werkzeuge Speisekarte.
- Laden Sie den Code durch Klicken hoch Hochladen.
- Öffnen Sie den Serienmonitor (Werkzeuge > Serienmonitor) und den Baudrate auf festlegen
9600. - Drehen Sie den Magneten vor dem AS5600 -Sensor. Der Winkel in Grad sollte in Echtzeit angezeigt werden.
Optional: Verwenden Sie den analogen Ausgangsmodus
- Verbinden Sie die
OUTStift des AS5600 zu einem analogen Stift am Arduino (z. B. A0). - Ändern Sie den Code, um die analoge Spannung zu lesen:
const int analogPin = A0;
void setup() {
Serial.begin(9600);
pinMode(analogPin, INPUT);
}
void loop() {
int value = analogRead(analogPin); // Read analog voltage
float angle = map(value, 0, 1023, 0, 360); // Convert to degrees
Serial.print("Analog Angle: ");
Serial.print(angle);
Serial.println(" degrees");
delay(100);
}
Anwendungen des AS5600
- Motorische Positionserfassung
- Rotary Knob -Encoder
- Messung des Robotergelenkswinkels
- Kamera Gimbal Stabilisierungssysteme
Fehlerbehebung
- Keine Daten: Überprüfen Sie die I2C -Verbindungen und stellen Sie sicher, dass die richtigen Stifte im Code definiert sind.
- Unregelmäßige Werte: Stellen Sie sicher, dass der Magnet korrekt positioniert und mit dem Sensor ausgerichtet ist.
-
Keine Antwort im analogen Modus: Bestätigen Sie die
MODEPIN ist korrekt konfiguriert.
Abschluss
Sie haben den AS5600 -Magnetkodiercodierer erfolgreich mit Arduino mit Arduino verbunden, um die Winkelposition zu messen. Unabhängig davon, ob Sie i2c für die Einfachheit für präzise Lesungen oder den analogen Modus verwenden, ist dieser Sensor ein vielseitiges Tool für Projekte, die eine Rotationsmessung erfordern. Experimentieren Sie weiter, indem Sie es in Motorkontroll- oder Robotikprojekte integrieren!