





Das MCP2515 ist ein CAN -Busmodul (Controller Area Network), das für die Automobil- und Industriekommunikation häufig verwendet wird. Es ermöglicht Arduino, mit CAN-basierten Systemen Daten effizient zu senden und zu empfangen. In diesem Tutorial führen Sie das MCP2515 -Modul mit Arduino ein und verwenden Sie das MCP2515 -Modul.
Was Sie brauchen werden
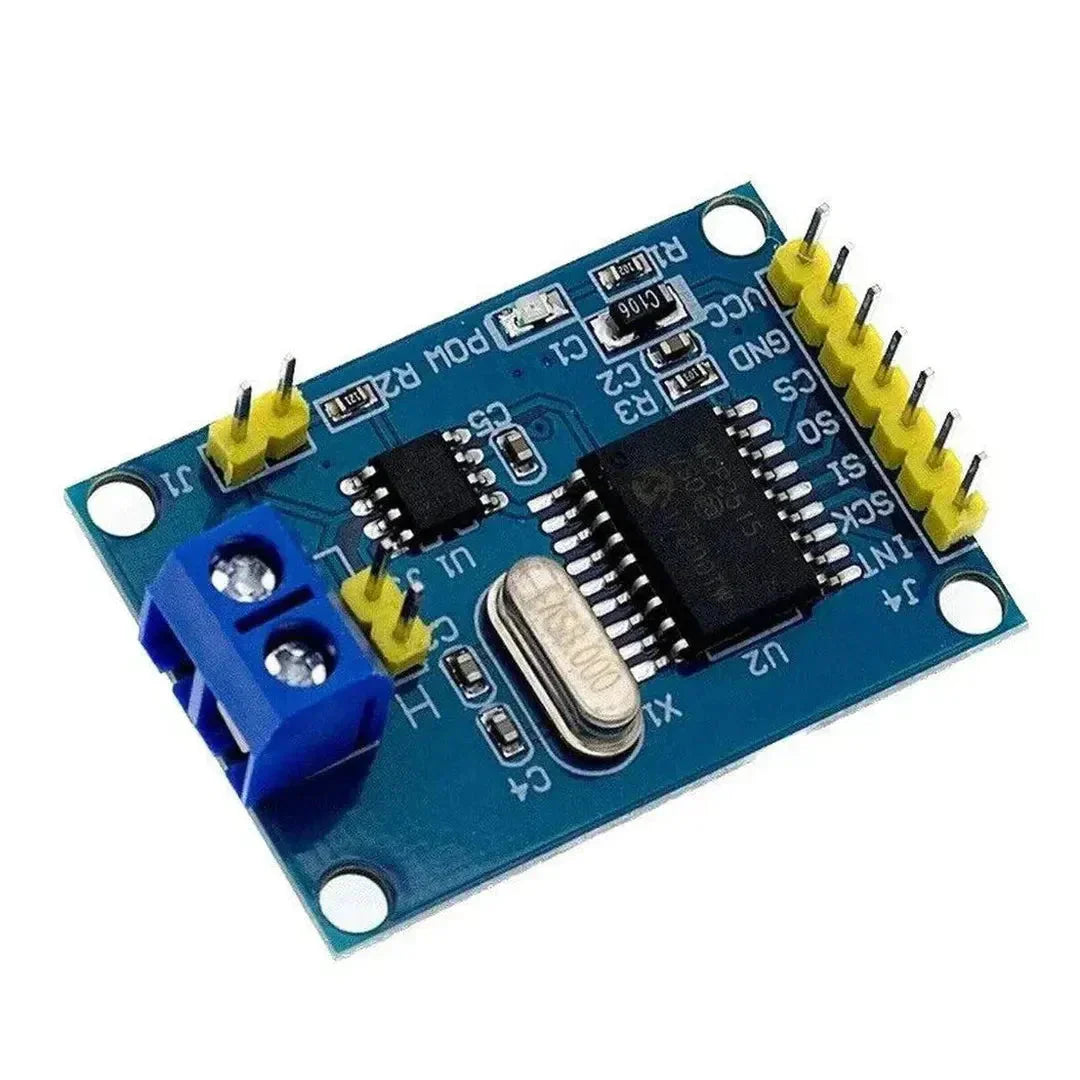
- MCP2515 CAN -Busmodul
- Arduino Board (z. B. Uno, Mega, Nano)
- CAN-BUS-kompatibles Gerät oder ein anderes MCP2515-Modul
- Jumperdrähte
- Breadboard (optional)
- Ein Computer mit der Arduino -IDE installiert
Schritt 1: Verständnis des MCP2515 -Moduls
Das MCP2515 -Modul verwendet den MCP2515 CAN CONTROLERER IC und TJA1050 CAN TRANSCEIVER. Das Modul kommuniziert über die SPI -Schnittstelle mit dem Arduino.
MCP2515 Pinout
| Stift | Funktion |
|---|---|
| VCC | Stromversorgung (5 V) |
| GND | Boden |
| CS | Chip auswählen |
| ALSO | SPI -Datenausgabe |
| Si | SPI -Dateneingabe |
| Sck | SPI -Uhr |
| Int | Ausgang unterbrechen |
Schritt 2: Verkabelung des MCP2515 mit Arduino
Unten finden Sie die Verdrahtungsanleitung zum Anschließen des MCP2515 -Moduls mit einem Arduino Uno:
| MCP2515 Pin | Arduino Pin |
|---|---|
| VCC | 5v |
| GND | GND |
| CS | Pin 10 |
| ALSO | Pin 12 |
| Si | Pin 11 |
| Sck | Pin 13 |
| Int | Pin 2 |
Notiz: Stellen Sie für andere Arduino -Boards sicher, dass die SPI -Stifte der Pinout Ihres spezifischen Boards entsprechen.
Schritt 3: Installieren Sie die erforderliche Bibliothek
Der Mcp_can Die Bibliothek vereinfacht die Interaktion mit dem MCP2515 -Modul.
Schritte zur Installation von MCP_CAN -Bibliothek:
- Öffnen Sie die Arduino -IDE.
- Gehen zu Skizzieren > Bibliothek einbeziehen > Bibliotheken verwalten.
- Suchen Sie im Bibliotheksmanager nach "mcp_can".
- Klicken Installieren.
Schritt 4: Laden Sie den Code hoch hoch
Sendercode (Senden von Daten im CAN -Bus):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
if (CAN.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully");
} else {
Serial.println("Error Sending Message");
}
delay(1000); // Send data every second
}
Empfängercode (Lesen von Daten aus dem CAN -Bus):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char len = 0;
unsigned char buf[8];
if (CAN.checkReceive() == CAN_MSGAVAIL) {
CAN.readMsgBuf(&len, buf);
unsigned long id = CAN.getCanId();
Serial.print("Message ID: 0x");
Serial.println(id, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
Schritt 5: Testen Sie das Setup
- Schließen Sie das MCP2515 -Modul an Ihr Arduino an, wie in Schritt 2 beschrieben.
- Laden Sie den Sendercode auf einen Arduino und den Empfängercode in einen anderen Arduino hoch.
- Schließen Sie die CAN_H- und CAN_L -Stifte beider MCP2515 -Module an, um den CAN -Bus zu etablieren.
- Öffnen Sie den seriellen Monitor bei beiden Arduinos und setzen Sie die Baud -Rate auf
115200. - Auf dem Empfänger Arduino sollten Sie die vom Sender Arduino gesendeten Nachrichten sehen.
Fehlerbehebung
- Keine Daten erhalten: Überprüfen Sie die Verbindungen von CAN_H und CAN_L zwischen den Modulen.
- Initialisierung fehlgeschlagen: Stellen Sie sicher, dass die SPI -Verbindungen und der CS -PIN mit Ihrem Setup übereinstimmen.
- Unberechenbare Kommunikation: Stellen Sie sicher, dass beide Module die gleiche Baudrate verwenden (500 kbit / s in diesem Beispiel).
Anwendungen des MCP2515 -CAN -Busmoduls
- Fahrzeugdiagnostik (OBD-II)
- Industrieautomatisierungssysteme
- Robotikkommunikation
- IoT -Geräte mit CAN -Busnetzwerken
Abschluss
Sie haben das MCP2515 -CAN -Modul mit Arduino erfolgreich eingerichtet, um Daten zu senden und zu empfangen. Dieses Modul ist unglaublich vielseitig für Anwendungen, die eine zuverlässige Kommunikation über einen CAN -Bus erfordern. Experimentieren Sie mit verschiedenen Nachrichten -IDs und Datennutzlasten, um das volle Potenzial zu untersuchen!



































































































































