
Der BTS7960 Motor-Treiber ist ein leistungsstarkes H-Bridge-Modul, mit dem hohe Ströme bearbeitet werden können. Damit ist es ideal, um DC-Motoren in Robotik- und Automatisierungsprojekten zu steuern. In diesem Tutorial lernen Sie, wie Sie die BTS7960 mit einem Himbeer -PI anschließen und steuern, um einen Motor zu fahren.
Was Sie brauchen werden
- Raspberry Pi (Jedes Modell mit GPIO -Funktionen, z. B. PI 3, PI 4)
- BTS7960 Motorfahrermodul
- Gleichstrommotor (geeignet für Ihr Projekt)
- Externe Stromversorgung (Übereinstimmung mit den Spannungs- und Stromanforderungen Ihres Motors)
- Breadboard- und Jumper -Drähte
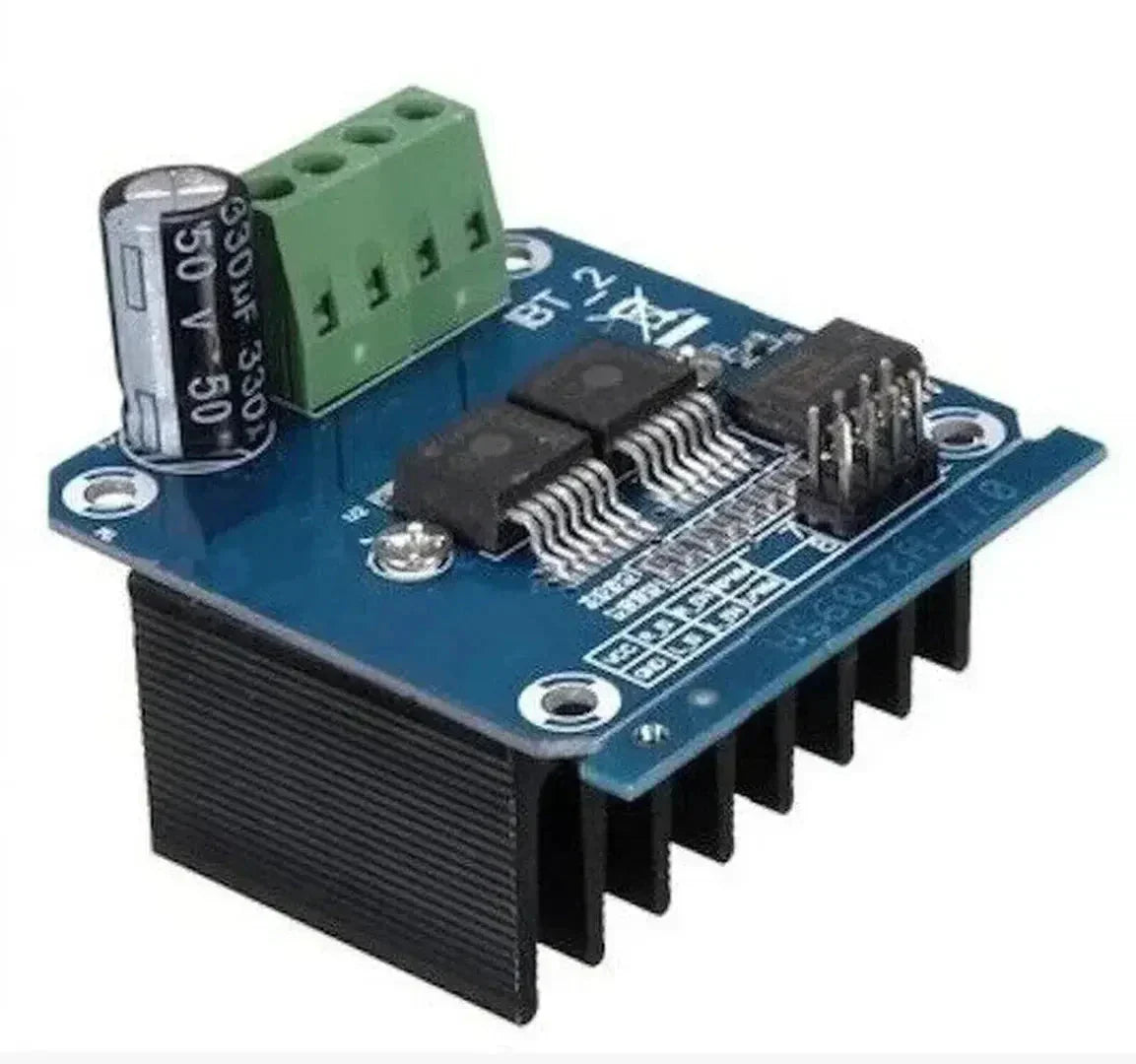
Schritt 1: Verständnis des BTS7960 Motor Treibers
Das BTS7960-Modul umfasst zwei Hochleistungs-Halbbrücken, die Motoren mit Strömen von bis zu 43A treiben können. Es enthält:
- PWM -Eingangsstifte für die Geschwindigkeitskontrolle
- Richtungssteuerstifte
- Überstrom- und Wärmeschutz
Pinout
| Stift | Beschreibung |
|---|---|
| VCC | 5V Logic Power Eingabe |
| GND | Boden |
| Rpwm | PWM -Eingabe für die Vorwärtsbewegung |
| LPWM | PWM -Eingang für die Umkehrbewegung |
| R_en | Die PIN für die Vorwärtsbewegung aktivieren |
| L_en | Aktivieren Sie den PIN für die Rückwärtsbewegung |
| Motor+ (M+) | Motor positives Terminal |
| Motor- (m-) | Motorischer negativer Anschluss |
| Vin | Externe Motorstromversorgung |
| GND (Kraft) | Masse für die Motorstromversorgung |
Schritt 2: Verkabelung der BTS7960 mit dem Raspberry Pi
Verbindungen
| BTS7960 PIN | Raspberry Pi Pin |
|---|---|
| VCC | 5v |
| GND | GND |
| Rpwm | Gpio18 (PWM -Kanal 0) |
| LPWM | GPIO19 (PWM -Kanal 1) |
| R_en | Gpio23 |
| L_en | Gpio24 |
Motor- und Stromversorgungsanschlüsse
- Schließen Sie die Motorklemmen an die an die an Motor+ (M+) Und Motor- (m-) Stifte.
- Verbinden Sie das positive Terminal des externen Stromversorgung mit Vin.
- Verbinden Sie den Boden des externen Stromversorgung mit dem GND (Kraft) Stift.
Notiz: Stellen Sie sicher, dass die externe Stromversorgung den Spannungs- und Stromanforderungen Ihres Motors entspricht.
Schritt 3: Aktivieren Sie PWM auf dem Raspberry Pi
Um die Motordrehzahl zu steuern, verwenden Sie PWM (Impulsbreitenmodulation). Raspberry Pi Gpio Pins 18 und 19 Support Hardware PWM.
Aktivieren Sie PWM über die Raspberry PI -Konfiguration
- Öffnen Sie das Terminal und laufen Sie:
sudo raspi-config - Navigieren zu Schnittstellenoptionen> P5: I2Cund aktivieren i2c.
- Speichern und starten Sie den Raspberry Pi: neu:
sudo reboot
Schritt 4: Python -Code schreiben, um den Motor zu steuern
Installieren Sie die RPi.GPIO Bibliothek zur Steuerung von GPIO -Stiften, falls dies nicht bereits installiert ist:
pip install RPi.GPIO
Beispiel Python Code
In diesem Beispiel wird gezeigt, wie die Geschwindigkeit und Richtung des Motors mithilfe der BTS7960 gesteuert werden.
import RPi.GPIO as GPIO
import time
# Pin Definitions
RPWM_PIN = 18
LPWM_PIN = 19
REN_PIN = 23
LEN_PIN = 24
# GPIO Setup
GPIO.setmode(GPIO.BCM)
GPIO.setup(RPWM_PIN, GPIO.OUT)
GPIO.setup(LPWM_PIN, GPIO.OUT)
GPIO.setup(REN_PIN, GPIO.OUT)
GPIO.setup(LEN_PIN, GPIO.OUT)
# PWM Setup
frequency = 1000 # PWM frequency in Hz
rpwm = GPIO.PWM(RPWM_PIN, frequency)
lpwm = GPIO.PWM(LPWM_PIN, frequency)
# Start PWM with 0% duty cycle (off)
rpwm.start(0)
lpwm.start(0)
try:
while True:
# Enable Forward Motion
GPIO.output(REN_PIN, GPIO.HIGH)
GPIO.output(LEN_PIN, GPIO.LOW)
# Set forward speed (50% duty cycle)
rpwm.ChangeDutyCycle(50)
lpwm.ChangeDutyCycle(0)
time.sleep(2)
# Enable Reverse Motion
GPIO.output(REN_PIN, GPIO.LOW)
GPIO.output(LEN_PIN, GPIO.HIGH)
# Set reverse speed (30% duty cycle)
rpwm.ChangeDutyCycle(0)
lpwm.ChangeDutyCycle(30)
time.sleep(2)
except KeyboardInterrupt:
print("Stopping motor...")
finally:
rpwm.stop()
lpwm.stop()
GPIO.cleanup()
Schritt 5: Testen Sie Ihr Setup
- Schließen Sie den Motor und die Stromversorgung an.
- Führen Sie das Python -Skript aus:
python3 bts7960_control.py - Beobachten Sie die motor ändernde Geschwindigkeit und Richtung als programmiert.
Fehlerbehebung
-
Motor nicht laufen:
- Überprüfen Sie die Verkabelungsverbindungen.
- Überprüfen Sie die externe Stromversorgung.
-
PWM funktioniert nicht:
- Stellen Sie sicher, dass GPIO18 und GPIO19 für PWM konfiguriert sind.
- Überprüfen Sie die Arbeitszykluswerte im Skript.
-
Überhitzungsmodul:
- Stellen Sie sicher, dass die aktuelle Auslosung des Motors die Bewertung der BTS7960 nicht überschreitet.
Anwendungen der BTS7960 mit Raspberry Pi
- Steuerung von DC-Motoren mit hohem Strom in der Robotik kontrollieren
- Bauen automatisierter Fahrzeuge oder Roboter
- Erstellen motorisierter Systeme für industrielle Anwendungen
- Entwicklung von ferngesteuerten Systemen
Abschluss
Der BTS7960 Motor-Treiber ist eine robuste und effiziente Lösung für das Fahren von Hochstrommotoren. In Kombination mit den GPIO -Funktionen des Raspberry Pi eröffnet es zahlreiche Möglichkeiten für Robotik- und Automatisierungsprojekte. Wenn Sie diesem Handbuch folgen, können Sie die BTS7960 einrichten und steuern, um leistungsstarke motorisierte Systeme zu erstellen. Experimentieren Sie mit verschiedenen PWM -Frequenzen und Arbeitszyklen, um die Leistung für Ihre spezifische Anwendung zu optimieren!



































































































































