Der L9110s Motor -Treiber ist eine kompakte und effiziente Lösung zur Steuerung von DC -Motoren und Schrittmotoren in Ihren Arduino -Projekten. Unabhängig davon, ob Sie einen einfachen Roboter oder ein komplexeres Automatisierungssystem erstellen, bietet der L9110s eine zuverlässige Möglichkeit, den Motorbetrieb mit minimaler Verkabelung und Programmierkomplexität zu verwalten. In diesem Blog -Beitrag werden wir die Funktionen des L9110s Motor Treibers untersuchen, wie Sie ihn an einen Arduino anschließen und Beispielcode bereitstellen, um Ihnen den Einstieg zu erleichtern.
Was ist der L9110s?
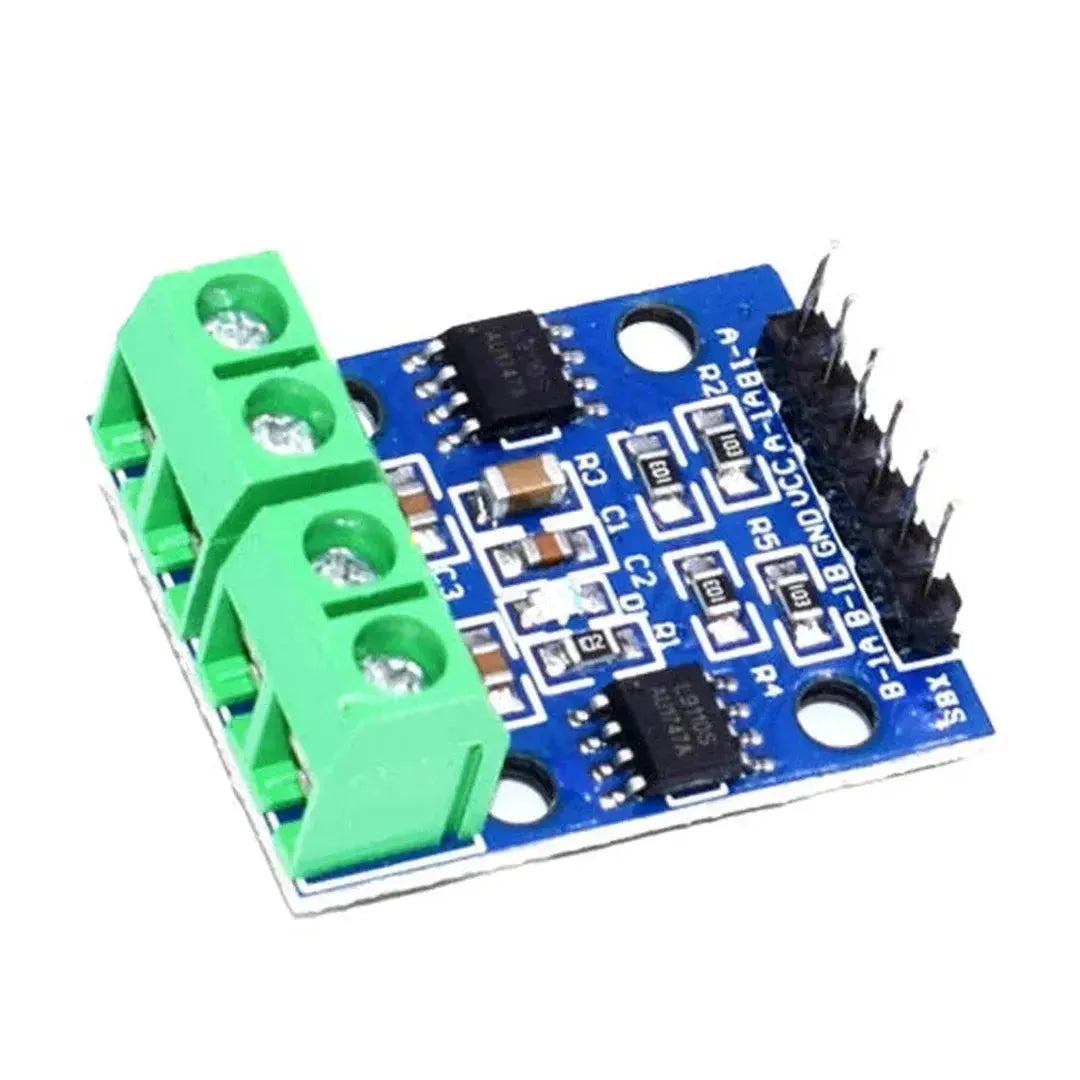
Der L9110S ist ein zweikanaler Treiber-IC, das die Geschwindigkeit und Richtung von zwei DC-Motoren oder einem Schrittmotor steuern kann. Es arbeitet mit einem Spannungsbereich von 2,5 V bis 12 V und ist damit vielseitig für verschiedene Anwendungen. Das L9110S ist bekannt für seine kompakte Größe, seinen geringen Stromverbrauch und die einfache Integration mit Mikrocontrollern wie dem Arduino.
Warum die L9110s wählen?
- Kompaktes Design: Sein kleiner Fußabdruck macht es ideal für Projekte mit begrenztem Platz.
- Doppelkanäle: Kontrolle zwei Motoren unabhängig voneinander und ermöglichen komplexe Bewegungen.
- Einfach zu bedienen: Einfache Schnittstelle mit klarer Beschriftung für einfache Verbindungen.
- Kostengünstig: Erschwingliche Preisgestaltung ohne Kompromisse bei der Funktionalität.
Verbinden des L9110s mit Arduino
Das Einrichten der L9110s mit einem Arduino ist unkompliziert. Unten finden Sie eine Schritt-für-Schritt-Anleitung, um die Verbindungen herzustellen:
-
Stromverbindungen:
- Verbinden Sie die
VCCStift des L9110s zum 5 -V -Stift am Arduino. - Verbinden Sie die
GNDStift des L9110s zum GND -Stift am Arduino.
- Verbinden Sie die
-
Motoranschlüsse:
- Schließen Sie den ersten Motor mit dem an
OUT1UndOUT2Stifte. - Wenn Sie einen zweiten Motor verwenden, verbinden Sie ihn an die
OUT3UndOUT4Stifte.
- Schließen Sie den ersten Motor mit dem an
-
Kontrollstifte:
- Verbinden Sie die
AIN1UndAIN2Stifte zu zwei digitalen Stiften am Arduino (z. B. Stifte 2 und 3). - Wenn Sie einen zweiten Motor verwenden, schließen Sie an
BIN1UndBIN2zu zwei weiteren digitalen Stiften (z. B. Stifte 4 und 5).
- Verbinden Sie die
Eine visuelle Darstellung der Verbindungen finden Sie im folgenden Diagramm:

Programmieren des Arduino
Nach dem Einrichten der Hardware besteht der nächste Schritt darin, den Arduino für die Steuerung der Motoren zu programmieren. Im Folgenden finden Sie einen Beispielcode, der zeigt, wie die Richtung und Geschwindigkeit eines DC -Motors mit dem L9110s -Motor -Treiber steuert.
// Define motor control pins
const int AIN1 = 2;
const int AIN2 = 3;
// Setup function
void setup() {
// Initialize the motor control pins as outputs
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
}
// Loop function
void loop() {
// Rotate motor forward
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
// Rotate motor backward
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
}
Erläuterung:
-
AIN1UndAIN2werden verwendet, um die Richtung des Motors zu steuern. - Einstellung
AIN1Hoch undAIN2Niedrig dreht den Motor vorwärts. - Einstellung
AIN1Niedrig undAIN2Hoch dreht den Motor rückwärts. - BEIDE BEIDEN
AIN1UndAIN2Niedriger stoppt den Motor.
Steuergeschwindigkeit mit PWM
Der L9110S unterstützt PWM (Impulsbreitenmodulation) für die Geschwindigkeitsregelung. Durch Variieren des Arbeitszyklus des PWM -Signals können Sie die Geschwindigkeit des Motors einstellen. Hier erfahren Sie, wie Sie den vorherigen Code so ändern, dass die Geschwindigkeitskontrolle einbezieht:
// Define motor control pins
const int AIN1 = 2;
const int AIN2 = 3;
const int PWM_PIN = 9; // PWM pin for speed control
// Setup function
void setup() {
// Initialize the motor control pins as outputs
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(PWM_PIN, OUTPUT);
}
// Loop function
void loop() {
// Set speed to 150 out of 255
analogWrite(PWM_PIN, 150);
// Rotate motor forward
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
// Rotate motor backward
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
}
Erläuterung: Der analogWrite() Die Funktion sendet ein PWM -Signal an den Motor, sodass Sie die Geschwindigkeit steuern können. Der Wert reicht von 0 (Stopp) bis 255 (volle Geschwindigkeit).
Anwendungen von L9110s mit Arduino
Die Kombination des L9110s Motor Triver und Arduino eröffnet eine breite Palette von Projektmöglichkeiten:
- Robotik: Steuern Sie die Bewegung von Roboterarmen oder mobilen Robotern mit präziser Motorkontrolle.
- Automatisierungssysteme: Automatisieren Sie Aufgaben wie Öffnen/Schließen von Türen, Einstellen von Ventilen oder Verschiebung von Komponenten in den Montageleitungen.
- DIY -Projekte: Erstellen Sie kundenspezifische Elektronikprojekte wie motorisierte Kamera-Schieberegler, automatisierte Anlagen-Wassering-Systeme oder ferngesteuerte Fahrzeuge.
- Bildungsinstrumente: Unterrichten Sie die Schüler über motorische Steuerung, Elektronik und Programmierung durch praktische Projekte.
Abschluss
Der L9110s Motor Triver ist eine vielseitige und benutzerfreundliche Komponente für alle, die Motoren mit einem Arduino steuern möchten. Die doppelte Kanalfunktion in Verbindung mit der Einfachheit in der Verkabelung und Programmierung macht es sowohl für Anfänger als auch für erfahrene Hobbyisten zu einer hervorragenden Wahl. Wenn Sie die in diesem Beitrag beschriebenen Schritte befolgen, können Sie die motorische Steuerung schnell in Ihre Projekte integrieren und die Funktionalität Ihrer Arduino-basierten Systeme erweitern.
Experimentieren Sie mit unterschiedlichen Motorgeschwindigkeiten, Richtungen und Anwendungen, um das Potenzial des L9110 -Motorfahrers vollständig zu nutzen. Happy Basteln!



































































































































