





Im Bereich der Automobil- und Industrieanwendungen ist eine zuverlässige Kommunikation zwischen mehreren Mikrocontrollern von größter Bedeutung. Das BUS -Protokoll für Controller Area Network (CAN) hat sich als robuste Lösung für solche Anforderungen herausgestellt. Dieser Blog -Beitrag befasst sich mit den Grundlagen des CAN -BUS -Protokolls und zeigt, wie der MCP2515 CAN CONTROLATER mit einem Arduino integriert wird und die nahtlose Kommunikation in Ihren Projekten ermöglicht.
Was kann das Busprotokoll?
Der Bus (Controller Area Network) ist ein robuster Fahrzeugbusstandard, mit dem Mikrocontroller und Geräte ohne Host -Computer miteinander kommunizieren können. CAN hat in den 1980er Jahren von Bosch entwickelt und ist zu einem Standard in Automobilsystemen geworden, wird aber auch in der industriellen Automatisierung und anderen eingebetteten Systemen häufig eingesetzt.
Zu den wichtigsten Merkmalen des CAN -BUS -Protokolls gehören:
- Multi-Master-Konfiguration: Mehrere Knoten können ohne zentralen Controller im selben Bus kommunizieren.
- Priorisierung der Nachrichten: Nachrichten werden basierend auf ihrer Kennung priorisiert, um sicherzustellen, dass kritische Daten zuerst übertragen werden.
- Fehlererkennung: Robuste Fehlererkennungsmechanismen, einschließlich CRC -Überprüfungen und Bestätigungsbits, verbessern die Zuverlässigkeit.
- Hochgeschwindigkeitskommunikation: Unterstützt die Datenraten bis zu 1 Mbit / s, die für Echtzeitanwendungen geeignet sind.
Diese Funktionen können bus ideal für Szenarien sind, in denen mehrere Geräte effizient und zuverlässig kommunizieren müssen, z. B. in Fahrzeugmotormanagementsystemen, industrielle Automatisierung und Robotik.
Einführung des MCP2515 -CAN -Controllers
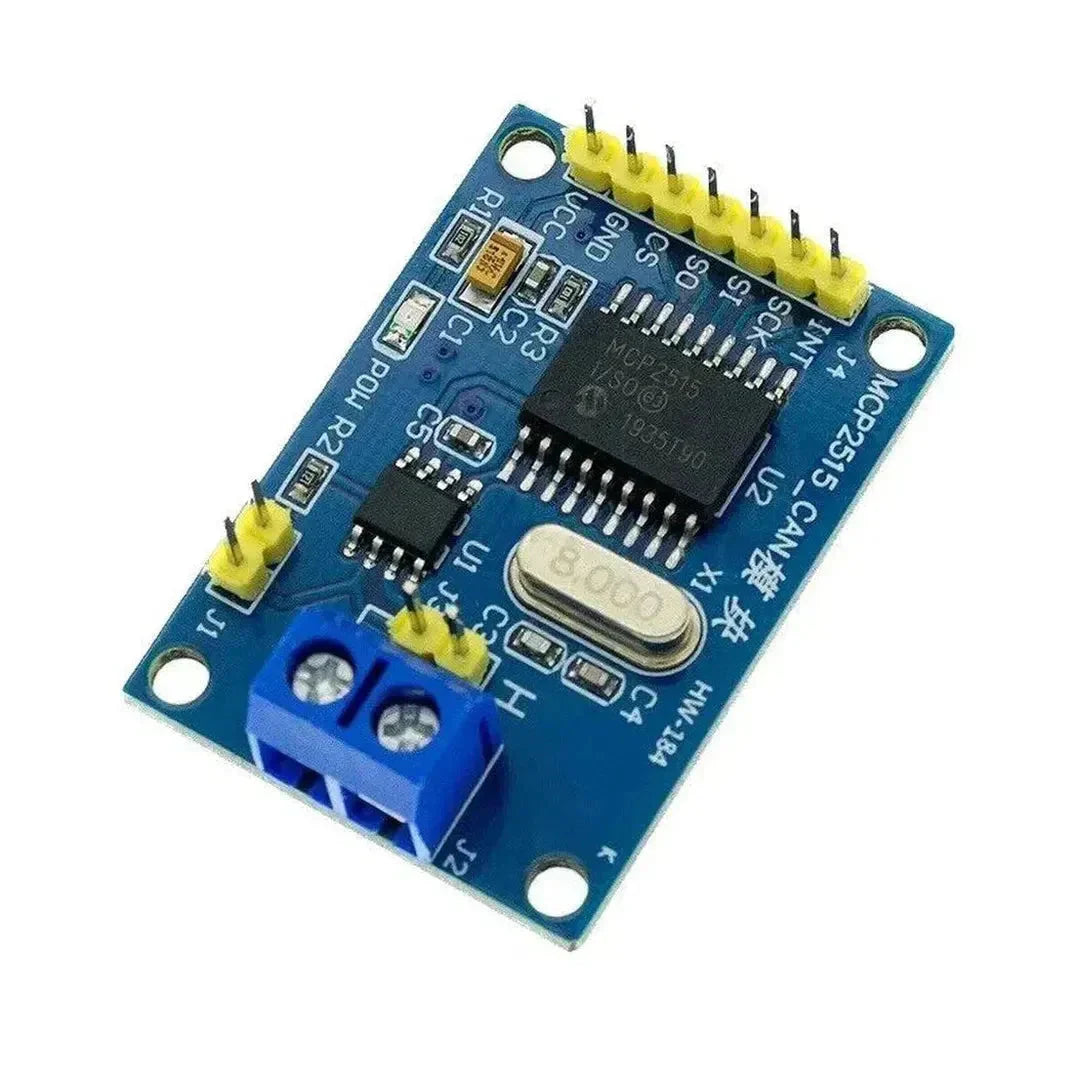
Der MCP2515 ist ein CAN-Controller (Stand-Alone Controller Area Network), der über die serielle periphere Schnittstelle (SPI) mit Mikrocontrollern übergeht. Es behandelt das komplizierte Protokoll, sodass Entwickler sich auf die Anwendungslogik auf höherer Ebene konzentrieren können. Zu den wichtigsten Merkmalen des MCP2515 gehören:
- Unterstützung für Standard und erweiterte Dose Frames.
- Eingebaute Fehlerbehebung und Filtermechanismen.
- Kompatibilität mit verschiedenen Mikrocontrollern, einschließlich Arduino.
- Niedriger Stromverbrauch und ist für eingebettete Systeme geeignet.
Durch die Integration des MCP2515 in ein Arduino können Sie Ihre Projekte zu Busfunktionen hinzufügen und die Kommunikation mit anderen Can-fähigen Geräten oder Netzwerken ermöglichen.
Einrichten des MCP2515 mit Arduino
Um loszulegen, benötigen Sie die folgenden Komponenten:
- Arduino Board (z. B. Arduino Uno)
- MCP2515 -CAN -Modul (häufig mit einem TJA1050 -CAN TRANSCEIVER geliefert)
- Jumperdrähte
- Breadboard (optional)
Hier finden Sie eine Schritt-für-Schritt-Anleitung zum Einrichten des MCP2515 mit Ihrem Arduino:
1. Verkabelung des MCP2515 mit Arduino
Verbinden Sie das MCP2515 -Modul wie folgt mit dem Arduino:
- VCC Zu 5v auf Arduino
- GND Zu GND auf Arduino
- CS Zu Pin 10 auf Arduino
- Sck Zu Pin 13 auf Arduino
- Si (Mosi) zu Pin 11 auf Arduino
- ALSO (Miso) zu Pin 12 auf Arduino
- Int Zu Pin 2 auf Arduino
Arduino MCP2515
------- -------
5V ------> VCC
GND ------> GND
Pin 10 ------> CS
Pin 13 ------> SCK
Pin 11 ------> SI (MOSI)
Pin 12 ------> SO (MISO)
Pin 2 ------> INT
2. Installieren der erforderlichen Bibliotheken
Um mit dem MCP2515 zu kommunizieren, benötigen Sie die mcp_can Bibliothek. Installieren Sie es über den Arduino Library Manager:
- Öffnen Sie die Arduino -IDE.
- Navigieren zu Skizze> Bibliothek einschließen> Bibliotheken verwalten ...
- Suchen nach mcp_can und installieren Sie die mcp_can Bibliothek von Cory J. Fowler.
3. Laden Sie den Beispielcode hochladen
Hier ist ein grundlegendes Beispiel zum Senden und Empfangen von Nachrichten mit dem MCP2515 und Arduino:
Senden einer Dose -Nachricht
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
byte data[] = {0x00, 0xFF, 0xAA, 0x55, 0x33, 0x66, 0x99, 0xCC};
// Send data: CAN ID = 0x100, data length = 8
if (CAN0.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully!");
} else {
Serial.println("Error Sending Message...");
}
delay(1000);
}
Empfangen einer Dose -Nachricht
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
unsigned long canId;
byte len = 0;
byte buf[8];
// Check if data has been received
if (CAN0.checkReceive() == CAN_MSGAVAIL) {
CAN0.readMsgBuf(&canId, &len, buf);
Serial.print("CAN ID: 0x");
Serial.println(canId, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
In der Sendungsskizze überträgt der Arduino eine Dose -Nachricht mit ID 0x100 jede Sekunde. Die empfangende Skizze hört für eingehende Dose Nachrichten zu und druckt die ID und Daten in den seriellen Monitor.
Anwendungen von CAN -Bus mit Arduino
Das Integrieren von CAN -Bus in Arduino eröffnet eine Vielzahl von Anwendungen über Automobilsysteme hinaus. Einige beliebte Anwendungsfälle umfassen:
- Robotik: Aktivieren Sie die Kommunikation zwischen mehreren motorischen Controllern und Sensoren.
- Industrieautomatisierung: Erleichterung des Datenaustauschs zwischen verschiedenen Maschinen- und Steuereinheiten.
- Heimautomatisierung: Verbinden Sie verschiedene intelligente Geräte in einem einheitlichen Netzwerk.
- Datenerfassungssysteme: Sammeln und verarbeiten Sie Daten von mehreren Sensoren effizient.
Abschluss
Das CAN -BUS -Protokoll mit seiner Zuverlässigkeit und Effizienz dient als Rückgrat für die Kommunikation in zahlreichen eingebetteten Systemen. Durch die Verwendung des MCP2515 -CAN -Controllers mit einem Arduino können Entwickler mühelos in ihre Projekte in den Bushaltungsfunktionen integrieren. Unabhängig davon, ob Sie an Automobilsystemen, industriellen Automatisierung oder komplexen Robotik, Verständnis und Hebung von Bussen arbeiten können, kann das Kommunikationsrahmen Ihres Systems erheblich verbessern.
Mit den umfassenden Leitfäden und Beispielen sind Sie gut ausgestattet, um in Ihr nächstes Arduino-Projekt zu integrieren. Happy Coding!

















































































































































