





Das MCP2515 ist ein beliebtes CAN (Controller Area Network) Controller-Modul, mit dem Raspberry Pi-Geräte mit Can-fähigen Systemen kommunizieren können. Dies macht es ideal für Automobilprojekte, industrielle Automatisierung und IoT -Anwendungen. In dieser Anleitung wird erläutert, wie die MCP2515 mit einem Raspberry Pi eingerichtet und verwendet werden.
Was Sie brauchen werden
- Raspberry Pi (Jedes Modell mit GPIO -Unterstützung, z. B. PI 3, PI 4)
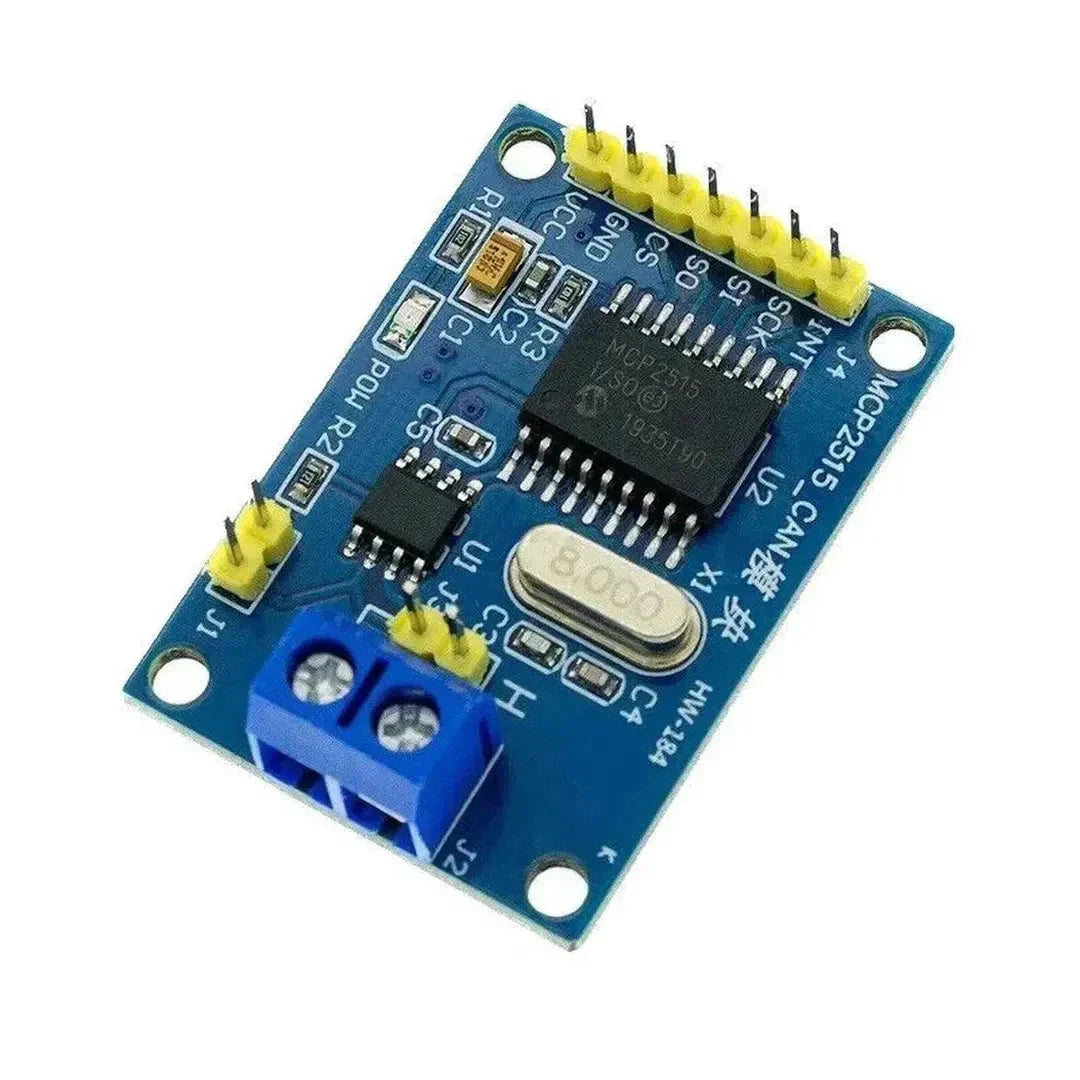
- MCP2515 Can Modul
- Breadboard- und Jumper -Drähte
- Ein Computer mit SSH -Zugriff auf den Raspberry PI oder eine angeschlossene Tastatur und einen Monitor
- Python auf dem Raspberry Pi installiert
- Kann Transceiver -Modul (falls nicht im MCP2515 enthalten)
Schritt 1: Verkabelung des MCP2515 mit dem Raspberry Pi
Der MCP2515 kommuniziert mit dem Raspberry PI unter Verwendung des SPI -Protokolls.
Verbindungen (SPI -Modus)
| MCP2515 Pin | Raspberry Pi Pin |
|---|---|
| VCC | 3,3 V (Pin 1) |
| GND | Masse (Pin 6) |
| CS | Gpio8 (Pin 24, SPI0_CE0) |
| ALSO | Gpio9 (Pin 21, spi0_miso) |
| Si | Gpio10 (Pin 19, spi0_mosi) |
| Sck | Gpio11 (Pin 23, SPI0_SCLK) |
| Int | Gpio25 (Pin 22) |
Schritt 2: Aktivieren Sie die SPI -Schnittstelle am Raspberry Pi
- Öffnen Sie das Raspberry PI -Konfigurationstool:
sudo raspi-config - Navigieren zu Schnittstellenoptionen> SPI und es aktivieren.
- Starten Sie den Raspberry Pi neu:
sudo reboot
Schritt 3: Installieren Sie die erforderlichen Bibliotheken und Tools
- Aktualisieren Sie Ihren Raspberry Pi:
sudo apt update && sudo apt upgrade -y - Installieren Sie die
can-utilsPaket für CAN -Kommunikation:sudo apt install -y can-utils
Schritt 4: Konfigurieren Sie die CAN -Schnittstelle
-
Öffnen die
/boot/config.txtfile:sudo nano /boot/config.txt -
Fügen Sie die folgenden Zeilen hinzu, um das MCP2515 -Overlay zu aktivieren:
dtoverlay=mcp2515-can0,oscillator=16000000,interrupt=25 dtoverlay=spi-bcm2835Speichern und beenden.
-
Starten Sie den Raspberry Pi neu:
sudo reboot -
Rufen Sie die Dose -Schnittstelle an:
sudo ip link set can0 up type can bitrate 500000 -
Überprüfen Sie die CAN -Schnittstelle:
ifconfig can0
Schritt 5: Testen des MCP2515
-
Senden Sie eine Dose -Nachricht: Benutze die
cansendBefehl zum Senden einer Testnachricht:cansend can0 123#DEADBEEF -
Erhalten Sie eine Dose -Nachricht: Benutze die
candumpBefehl zur Überwachung eingehender Nachrichten:candump can0
Schritt 6: Verwenden Sie Python, um mit dem MCP2515 zu kommunizieren
Installieren Sie die python-can Bibliothek zum Senden und Empfangen von Nachrichten über Python.
Installation
pip install python-can
Beispiel Python Skript
import can
# Create a CAN bus instance
bus = can.interface.Bus(channel='can0', bustype='socketcan')
# Send a CAN message
msg = can.Message(arbitration_id=0x123, data=[0xDE, 0xAD, 0xBE, 0xEF], is_extended_id=False)
bus.send(msg)
print("Message sent: ", msg)
# Receive a CAN message
print("Waiting for a message...")
message = bus.recv()
print("Received message: ", message)
Fehlerbehebung
-
Kann die Schnittstelle nicht gefunden:
- Überprüfen Sie, ob die SPI -Schnittstelle aktiviert ist.
- Überprüfen Sie die Verkabelung zwischen Raspberry Pi und MCP2515.
- Stellen Sie sicher, dass die
/boot/config.txtDie Datei ist korrekt konfiguriert.
-
Keine Dose Nachrichten:
- Überprüfen Sie, ob der CAN-Bus ordnungsgemäß mit 120-Ohm-Widerständen beendet wird.
- Stellen Sie sicher, dass die Bitrate -Übereinstimmungen auf allen Geräten im CAN -Bus übereinstimmen.
-
Python -Fehler:
- Stellen Sie sicher, dass die
python-canBibliothek ist installiert. - Überprüfen Sie das Python -Skript auf Tippfehler oder Konfigurationsfehler.
- Stellen Sie sicher, dass die
Anwendungen des MCP2515
- Automobildiagnostik und Überwachung
- Industrieautomatisierungssysteme
- Robotikkommunikationsnetzwerke
- IoT -Projekte, die zuverlässige Kommunikationsprotokolle benötigen
Abschluss
Das MCP2515 -CAN -Controller -Modul verleiht Ihrem Raspberry PI robuste Kommunikationsfunktionen und ist so ideal für Automobil-, Industrie- und IoT -Anwendungen. Wenn Sie diesem Handbuch folgen, können Sie den MCP2515 einrichten und testen und leistungsstarke Projekte aufbauen, die das CAN -Protokoll nutzen.



































































































































