
Der VL53L0X ist ein Flugzeitssensor (TOF), der Entfernungen mithilfe der Lasertechnologie genau misst. Es wird häufig in Robotik-, Automatisierungs- und Hinderniserkennungsanwendungen verwendet. Diese Anleitung führt Sie durch die Einrichtung und Verwendung des VL53L0X mit einem Himbeer -Pi.
Was Sie brauchen werden
- Raspberry Pi (Jedes Modell mit GPIO -Unterstützung, z. B. PI 3, PI 4)
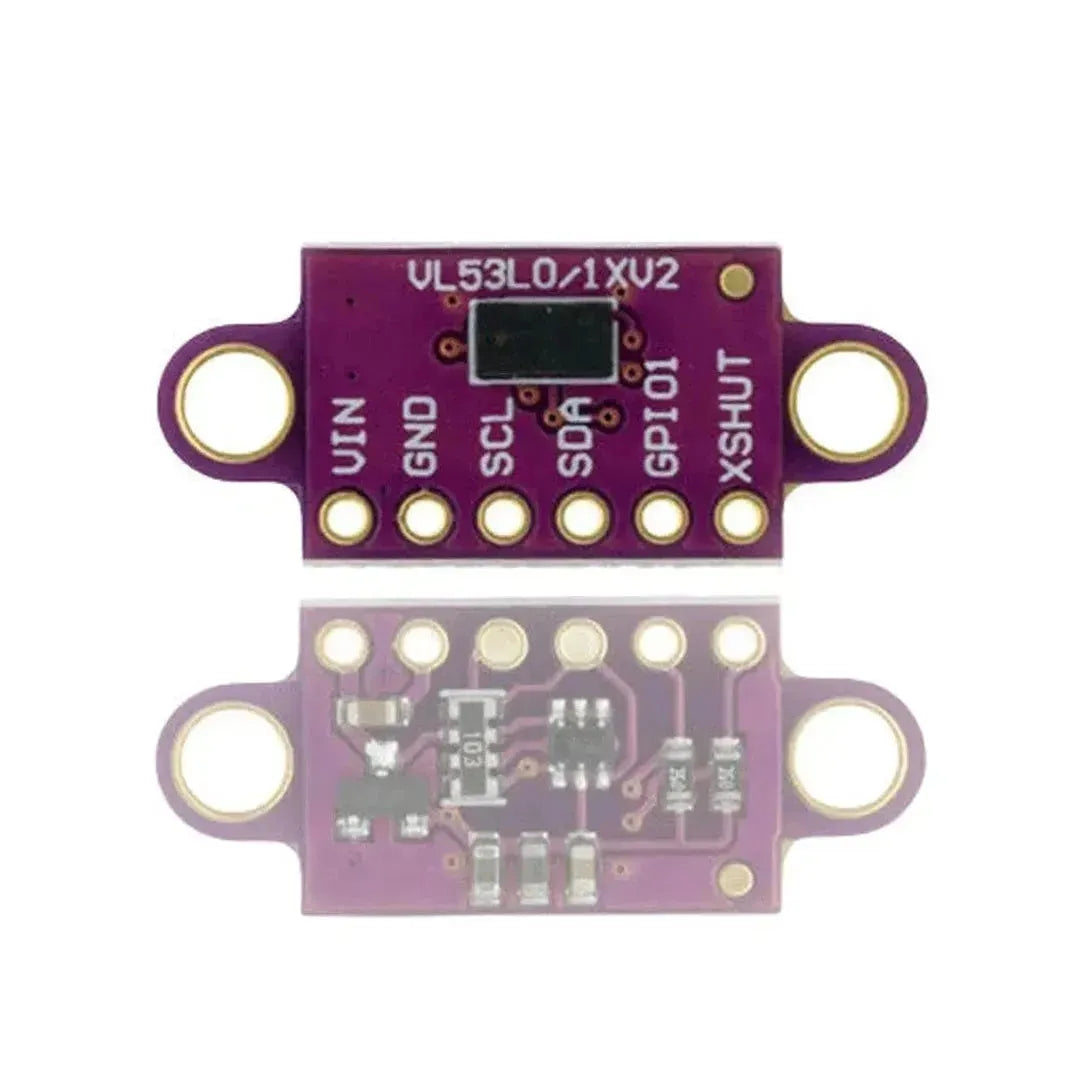
- VL53L0X -Abstandssensormodul
- Breadboard- und Jumper -Drähte
- Python installiert Auf dem Raspberry Pi
Schritt 1: Verkabelung des VL53L0X an den Raspberry Pi
Der VL53L0X kommuniziert über I2CDeshalb müssen wir es mit den I2C -Stiften des Himbeer -Pi anschließen.
Verbindungen
| VL53L0X PIN | Raspberry Pi Pin |
|---|---|
| VCC | 3,3 V (Pin 1) |
| GND | Masse (Pin 6) |
| SDA | SDA (Pin 3, gpio2) |
| Scl | SCL (Pin 5, gpio3) |
| Xshut (optional) | Jeder GPIO (um den Sensor zu aktivieren/zu deaktivieren) |
Schritt 2: Aktivieren Sie I2C am Raspberry Pi
Da der VL53L0X über I2C kommuniziert, müssen wir die I2C -Schnittstelle aktivieren.
-
Öffnen Sie das Raspberry PI -Konfigurationstool:
sudo raspi-config -
Navigieren zu Schnittstellenoptionen> i2c und es aktivieren.
-
Starten Sie den Raspberry Pi neu:
sudo reboot -
Stellen Sie sicher, dass der Sensor durch Laufen erkannt wird:
sudo i2cdetect -y 1Der VL53L0X sollte bei erscheinen 0x29.
Schritt 3: Installieren Sie die erforderlichen Bibliotheken
- Aktualisieren Sie die Paketliste des Raspberry Pi:
sudo apt update && sudo apt upgrade -y - Installieren Sie die erforderlichen Python -Bibliotheken:
sudo apt install -y python3-pip i2c-tools python3-smbus pip3 install adafruit-circuitpython-vl53l0x
Schritt 4: Lesentfernungsdaten aus dem VL53L0X
Hier ist ein Python -Skript, um Entfernungen mit dem VL53L0X -Sensor zu messen.
Beispiel für Python -Code
import time
import board
import busio
import adafruit_vl53l0x
# Initialize I2C and VL53L0X sensor
i2c = busio.I2C(board.SCL, board.SDA)
vl53 = adafruit_vl53l0x.VL53L0X(i2c)
try:
while True:
distance = vl53.range # Read distance in millimeters
print(f"Distance: {distance} mm")
time.sleep(1)
except KeyboardInterrupt:
print("Exiting...")
Schritt 5: Anwendungen des VL53L0X
- Hinderniserkennung - Verwenden Sie in Robotik und autonomen Fahrzeugen, um Objekte zu erkennen.
- Proximity -Erfindung - Automatisieren Sie Türen, Sicherheitssysteme oder IoT -Anwendungen.
- Levelmessung - Überwachen Sie den Flüssigkeitsniveau in einem Behälter.
- Gestenerkennung - Handbewegungen für berührungslose Schnittstellen verfolgen.
Fehlerbehebung
-
Gerät nicht erkannt (
i2cdetectzeigt sich nicht0x29)- Überprüfen Sie die Verkabelung von SDA/SCL Stifte.
- Stellen Sie sicher, dass die I2C -Schnittstelle am Raspberry Pi aktiviert ist.
-
Ungenaue Lesungen
- Stellen Sie sicher, dass der Sensor nicht verstopft ist.
- Vermeiden Sie reflektierende Oberflächen, die zu falschen Messungen führen können.
-
Mehrere VL53L0X -Sensoren
- Benutze die Xshut PIN zum Zuweisen verschiedener I2C -Adressen an mehrere VL53L0X -Sensoren.
Abschluss
Der VL53L0X ist mächtig Laserbasis Distanzsensor Das integriert nahtlos in den Raspberry Pi. Wenn Sie diesem Leitfaden folgen, können Sie Entfernungen für Robotik-, Automatisierungs- und IoT -Projekte genau messen. Experimentieren Sie mit verschiedenen Anwendungen, um das volle Potenzial auszuschalten! 🚀