




El motor paso a paso 28BYJ-48 es un motor paso a paso popular y asequible que a menudo se usa en proyectos electrónicos de bricolaje. Junto con la placa del controlador ULN2003, es una excelente opción para aplicaciones que requieren un movimiento preciso, como robótica, controles deslizantes de cámara y automatización del hogar. Este tutorial lo guiará a través de la configuración y el control del motor paso a paso 28BYJ-48 con Arduino.
Lo que necesitarás
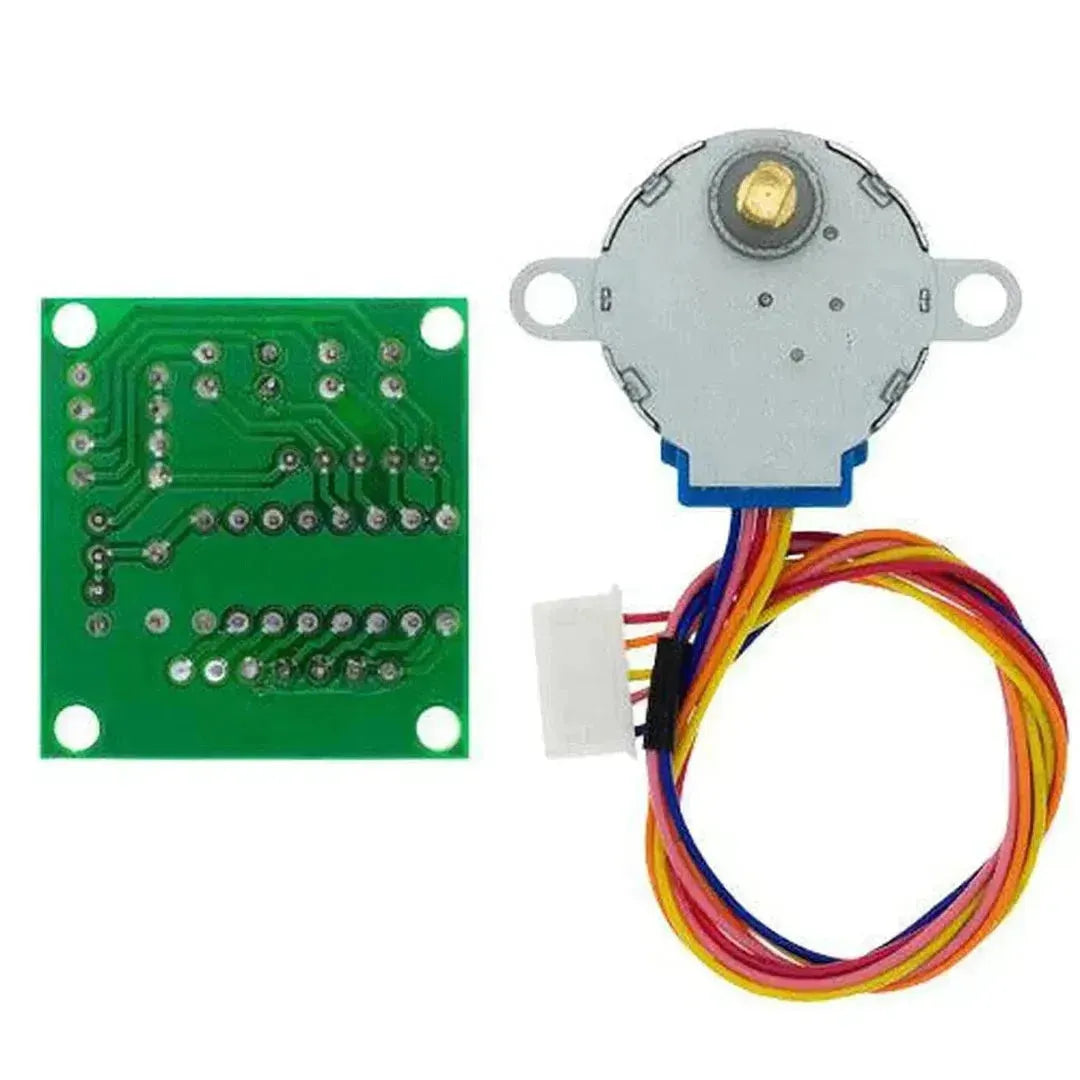
- 28byJ-48 motor paso a paso
- Tablero de conducir ULN2003
- Arduino Board (por ejemplo, Uno, Mega, Nano)
- Cables de jersey
- Paneles (opcional)
- Una computadora con el Arduino IDE instalado
Paso 1: Comprender los componentes
28byJ-48 motor paso a paso
- El 28BYJ-48 es un motor paso a paso de 4 fases y 5 hilos con una relación de reducción de engranaje de aproximadamente 1:64, lo que lo hace preciso y confiable.
Tablero de conducir ULN2003
- El ULN2003 es una placa de controlador diseñada específicamente para el motor 28BYJ-48. Incluye LED para indicar la fase activa del motor y simplifica las conexiones con el Arduino.
Paso 2: Cableado el ULN2003 a Arduino
-
Conecte el motor 28BYJ-48 a la placa del controlador ULN2003. El conector del motor se ajusta directamente al encabezado etiquetado "en" en la placa.
-
Use cables de puente para conectar la placa del controlador ULN2003 al Arduino de la siguiente manera:
| Pin ULN2003 | Alfiler de arduino |
|---|---|
| En 1 | Pin 8 |
| In2 | Pin 9 |
| En 3 | Pin 10 |
| In4 | Pin 11 |
| VCC | 5V |
| Gnd | Gnd |
Paso 3: Instale la biblioteca de paso a paso
El Arduino IDE incluye una biblioteca incorporada para el control del motor paso a paso.
- Abra el IDE Arduino.
- Ir a Bosquejo > Incluir biblioteca > Agitador.
Paso 4: cargar el código
Aquí hay un código de ejemplo básico para controlar el motor paso a paso:
#include <Stepper.h>
// Define the number of steps per revolution for the 28BYJ-48 motor
#define STEPS_PER_REV 2048
// Initialize the Stepper library on pins 8, 9, 10, and 11
Stepper stepper(STEPS_PER_REV, 8, 10, 9, 11);
void setup() {
stepper.setSpeed(15); // Set motor speed (in RPM)
Serial.begin(9600);
Serial.println("28BYJ-48 Stepper Motor Test");
}
void loop() {
Serial.println("Moving Forward");
stepper.step(STEPS_PER_REV); // Move one full revolution forward
delay(1000);
Serial.println("Moving Backward");
stepper.step(-STEPS_PER_REV); // Move one full revolution backward
delay(1000);
}
Paso 5: prueba la configuración
- Conecte el Arduino a su computadora a través de USB.
- Abra el IDE Arduino y seleccione el correcto Junta y Puerto bajo el Herramientas menú.
- Sube el código al Arduino haciendo clic en Subir.
- Una vez que se carga el código, el motor paso a paso debe girar una revolución completa hacia adelante y luego hacia atrás repetidamente.
Control avanzado con aceleración
Para un control más suave y más preciso, puede usar el Acelerador Biblioteca en lugar de la biblioteca de paso a paso incorporada. Aquí hay un ejemplo:
#include <AccelStepper.h>
// Define the motor interface type
#define HALFSTEP 8
// Initialize the AccelStepper library
AccelStepper stepper(HALFSTEP, 8, 10, 9, 11);
void setup() {
stepper.setMaxSpeed(1000); // Set maximum speed
stepper.setAcceleration(500); // Set acceleration
stepper.setSpeed(200); // Set initial speed
}
void loop() {
stepper.runSpeed(); // Continuous rotation
}
Solución de problemas
- Motor no se mueve: Verifique todas las conexiones y asegúrese de que los pines correctos estén definidos en el código.
- Movimiento errático: Verifique que la fuente de alimentación del motor sea suficiente y el código coincida con su configuración.
- Bajo par: El 28BYJ-48 no es un motor de alto torque. Asegúrese de que no esté sobrecargado.
Aplicaciones de 28byJ-48 motor paso a paso
- Sliders de cámara
- Brazos robóticos
- Persianas automatizadas
- Mecanismos de impresora 3D
Conclusión
Has configurado y controlado con éxito el motor paso a paso 28BYJ-48 con el controlador ULN2003 y Arduino. Este motor asequible y confiable es perfecto para varios proyectos de bricolaje. ¡Experimente con diferentes velocidades, pasos y métodos de control para que sus proyectos sean más dinámicos!



































































































































