





En el ámbito de las aplicaciones automotrices e industriales, la comunicación confiable entre múltiples microcontroladores es primordial. El protocolo de bus de área del área del controlador (CAN) ha surgido como una solución robusta para tales necesidades. Esta publicación de blog profundiza en los fundamentos del protocolo de bus CAN y demuestra cómo integrar el controlador MCP2515 CAN con un Arduino, lo que permite una comunicación perfecta en sus proyectos.
¿Qué es el protocolo de autobús?
El autobús del área de controlador (CAN) es un robusto estándar de bus de vehículos diseñado para permitir que los microcontroladores y dispositivos se comuniquen entre sí sin una computadora host. Desarrollado por Bosch en la década de 1980, el bus de la lata se ha convertido en un estándar en los sistemas automotrices, pero también se usa ampliamente en la automatización industrial y otros sistemas integrados.
Las características clave del protocolo de bus de lata incluyen:
- Configuración múltiple: Múltiples nodos pueden comunicarse en el mismo bus sin un controlador central.
- Priorización del mensaje: Los mensajes se priorizan en función de su identificador, asegurando que los datos críticos se transmitan primero.
- Detección de errores: Los mecanismos de detección de errores robustos, incluidas las verificaciones de CRC y los bits de reconocimiento, mejoran la confiabilidad.
- Comunicación de alta velocidad: Admite tarifas de datos de hasta 1 Mbps, adecuada para aplicaciones en tiempo real.
Estas características hacen que el bus de canales sea ideal para escenarios en los que múltiples dispositivos necesitan comunicarse de manera eficiente y confiable, como en sistemas de gestión de motores de vehículos, automatización industrial y robótica.
Introducir el controlador MCP2515 CAN
El MCP2515 es un controlador de red de área de controlador independiente (CAN) que interfiere con microcontroladores a través de la interfaz periférica serial (SPI). Maneja el protocolo de lata intrincado, lo que permite a los desarrolladores centrarse en la lógica de aplicaciones de nivel superior. Las características clave del MCP2515 incluyen:
- Soporte para marcos de lata estándar y extendido.
- Manejo de errores incorporado y mecanismos de filtrado.
- Compatibilidad con varios microcontroladores, incluido Arduino.
- Bajo consumo de energía, lo que lo hace adecuado para sistemas integrados.
Al integrar el MCP2515 con un Arduino, puede agregar capacidades de bus CAN a sus proyectos, permitiendo la comunicación con otros dispositivos o redes habilitados para la CAN.
Configuración del MCP2515 con Arduino
Para comenzar, necesitará los siguientes componentes:
- Junta de Arduino (por ejemplo, Arduino Uno)
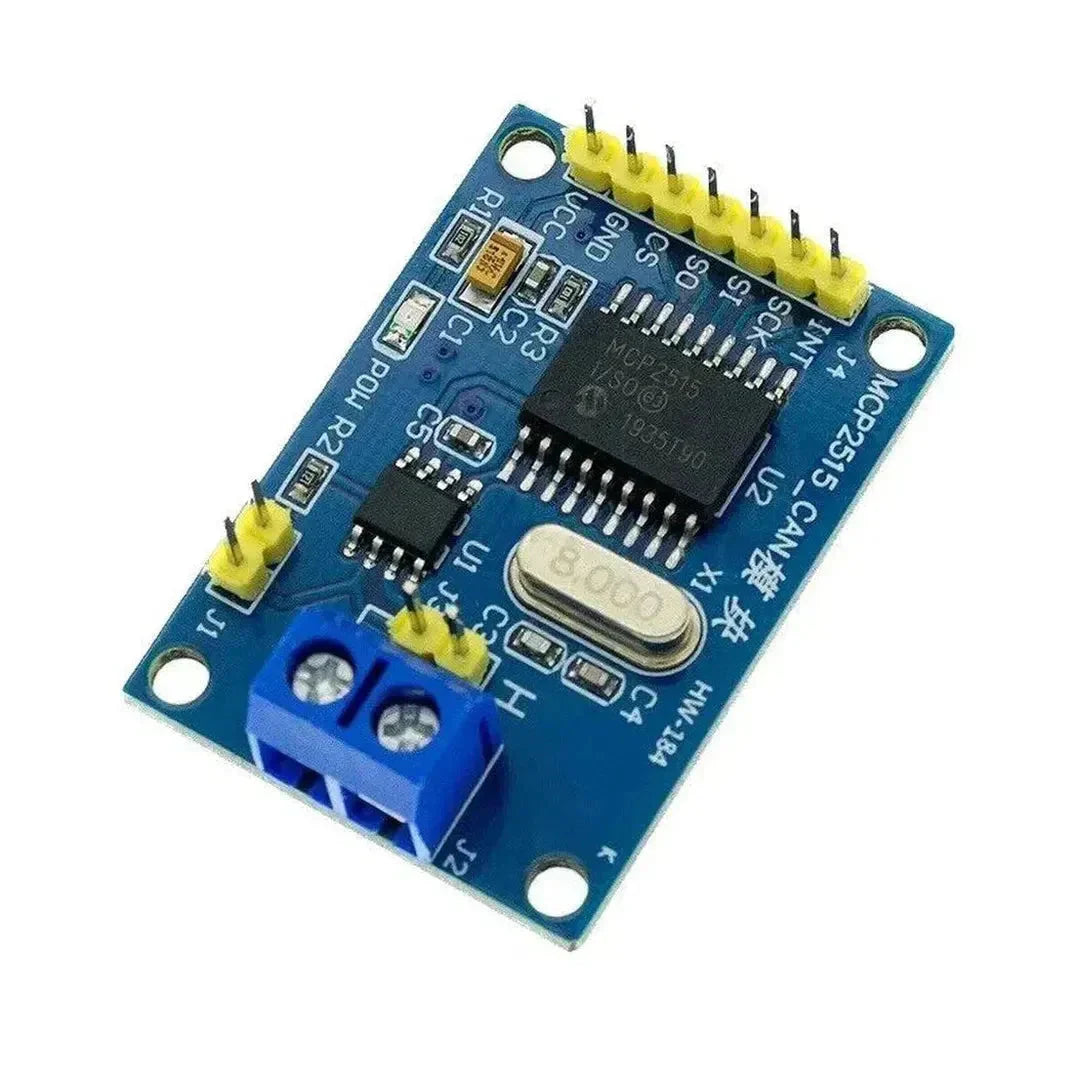
- Módulo MCP2515 CAN (a menudo viene con un transceptor TJA1050 CAN)
- Cables de jersey
- Paneles (opcional)
Aquí hay una guía paso a paso para configurar el MCP2515 con su Arduino:
1. Cableado el MCP2515 a Arduino
Conecte el módulo MCP2515 al Arduino de la siguiente manera:
- VCC a 5V en Arduino
- Gnd a Gnd en Arduino
- CS a Pin 10 en Arduino
- Sck a Pin 13 en Arduino
- SI (Mosi) a Pin 11 en Arduino
- ENTONCES (Miso) a Pin 12 en Arduino
- Intencionalmente a Pin 2 en Arduino
Arduino MCP2515
------- -------
5V ------> VCC
GND ------> GND
Pin 10 ------> CS
Pin 13 ------> SCK
Pin 11 ------> SI (MOSI)
Pin 12 ------> SO (MISO)
Pin 2 ------> INT
2. Instalación de las bibliotecas requeridas
Para comunicarse con el MCP2515, necesitará el mcp_can biblioteca. Instálelo a través del Administrador de la Biblioteca Arduino:
- Abra el IDE Arduino.
- Navegar por Sketch> incluir biblioteca> Administrar bibliotecas ...
- Buscar mcp_can e instalar el mcp_can Biblioteca de Cory J. Fowler.
3. Subiendo el código de ejemplo
Aquí hay un ejemplo básico para enviar y recibir mensajes CAN utilizando el MCP2515 y Arduino:
Enviar un mensaje de lata
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
byte data[] = {0x00, 0xFF, 0xAA, 0x55, 0x33, 0x66, 0x99, 0xCC};
// Send data: CAN ID = 0x100, data length = 8
if (CAN0.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully!");
} else {
Serial.println("Error Sending Message...");
}
delay(1000);
}
Recibir un mensaje de lata
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
unsigned long canId;
byte len = 0;
byte buf[8];
// Check if data has been received
if (CAN0.checkReceive() == CAN_MSGAVAIL) {
CAN0.readMsgBuf(&canId, &len, buf);
Serial.print("CAN ID: 0x");
Serial.println(canId, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
En el boceto de envío, el Arduino transmite un mensaje de lata con ID 0x100 uno de cada dos. El boceto receptor escucha los mensajes entrantes de la lata e imprime la identificación y los datos en el monitor en serie.
Aplicaciones del autobús CAN con Arduino
La integración del bus de Can con Arduino abre una multitud de aplicaciones más allá de los sistemas automotrices. Algunos casos de uso popular incluyen:
- Robótica: Habilite la comunicación entre múltiples controladores y sensores de motor.
- Automatización industrial: Facilitar el intercambio de datos entre diferentes maquinaria y unidades de control.
- Automatización del hogar: Conecte varios dispositivos inteligentes dentro de una red unificada.
- Sistemas de adquisición de datos: Recopilar y procesar datos de múltiples sensores de manera eficiente.
Conclusión
El protocolo de bus CAN, con su confiabilidad y eficiencia, sirve como columna vertebral para la comunicación en numerosos sistemas integrados. Al utilizar el controlador MCP2515 CAN con un Arduino, los desarrolladores pueden integrar sin esfuerzo las capacidades de Can Bus en sus proyectos. Ya sea que esté trabajando en sistemas automotrices, automatización industrial o robótica compleja, comprensión y apalancamiento, el bus puede mejorar significativamente el marco de comunicación de su sistema.
Con las guías y ejemplos integrales proporcionados, está bien equipado para embarcarse en la integración de la Can en su próximo proyecto Arduino. ¡Feliz codificación!

















































































































































