

AS5600 on korkearesoluutioinen pyörivä magneettinen sijaintianturi, joka voi mitata kulmat 360 °: een. I2C -rajapinnalla on helppo integroida Raspberry PI: llä tarkalle kulmamittauksille robotiikassa, automatisoinnissa ja muissa sovelluksissa. Tämä opas selittää, kuinka AS5600: ta käytetään Raspberry Pi: n kanssa kulma -asentojen lukemiseen.
Mitä tarvitset
- Raspberry Pi (Mikä tahansa malli, jolla on I2C -tuki, esim. Pi 3, pi 4)
- AS5600 Magneettinen kiertokooderimoduuli
- Magneetti (halkaisillisesti magnetoitu)
- Leipälevy- ja hyppyjohdot
- Tietokone, jolla on SSH -pääsy Raspberry PI: hen tai kytketty näppäimistö ja näyttö
- Python asennettu Raspberry Pi
Vaihe 1: Ota I2c käyttöön Raspberry Pi
- Avaa terminaali vadelmapillossasi.
- Suorita Raspberry Pi -määritystyökalu:
sudo raspi-config - Siirtyä jhk Käyttöliittymävaihtoehdot> I2C, ja ota se käyttöön.
- Käynnistä Raspberry Pi uudelleen:
sudo reboot
Vaihe 2: AS5600: n johdotus Raspberry Pi: hen
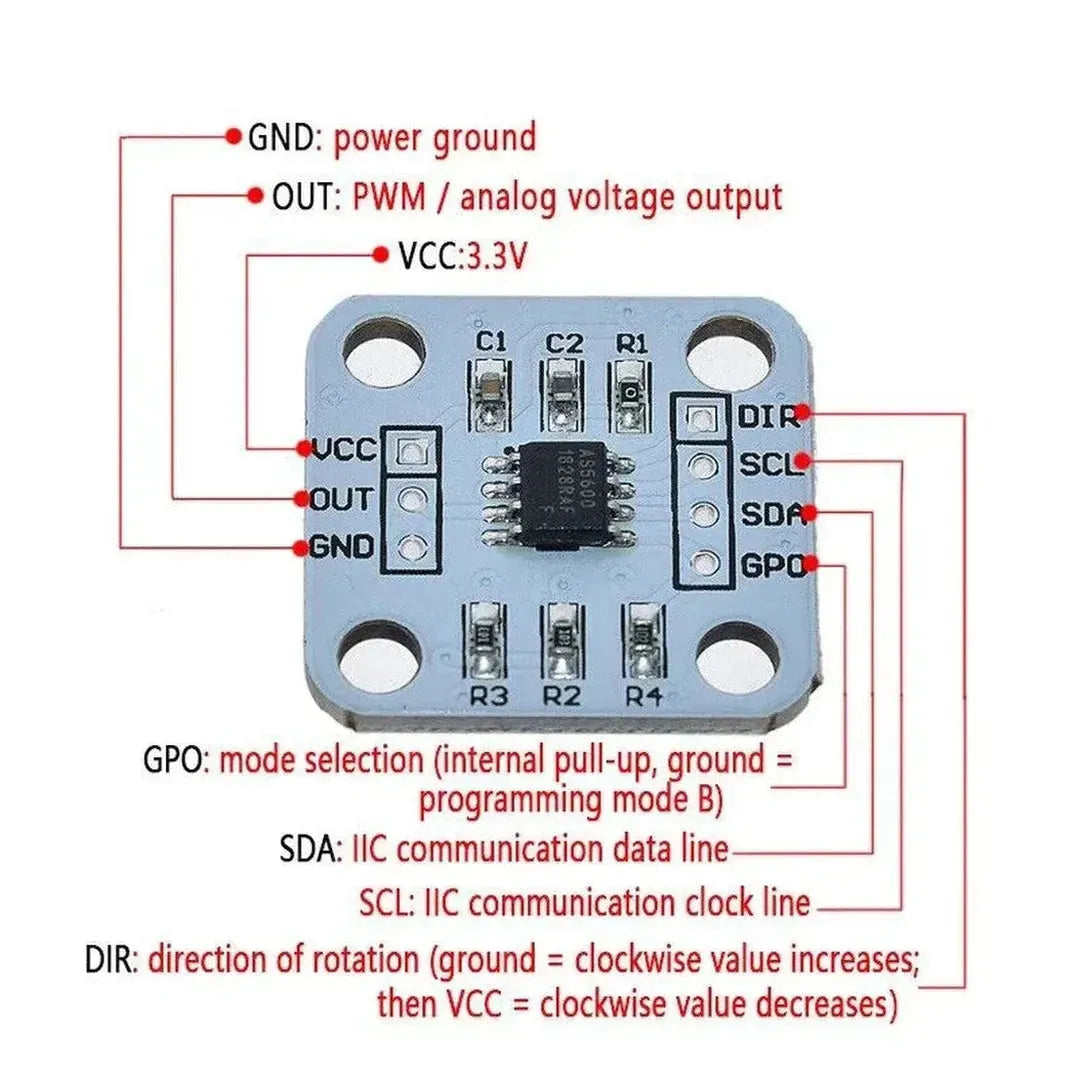
AS5600 käyttää I2C -protokollaa viestintään. Kytke se Raspberry Pi: hen seuraavasti:
| AS5600 -nasta | Raspberry Pi -tappi |
|---|---|
| VCC | 3,3 V (nasta 1) |
| Hölynpöly | Maa (nasta 6) |
| SDA | SDA (PIN 3, GPIO2) |
| SCL | SCL (nasta 5, GPIO3) |
Huomaa: Varmista, että AS5600 -moduulin käyttöjännite vastaa Raspberry Pi: n 3,3 V: n logiikkatasoa.
Vaihe 3: Asenna vaadittavat työkalut ja kirjastot
- Päivitä Raspberry Pi:
sudo apt update && sudo apt upgrade -y - Asenna I2C -työkalut:
sudo apt install -y i2c-tools - Asenna Python -kirjastot I2C -viestintään:
pip install smbus2
Vaihe 4: Vahvista I2C -yhteys
- Tunnista AS5600 I2C -väylässä:
sudo i2cdetect -y 1 - Sinun pitäisi nähdä laitteen osoite (esim.
0x36) lähtö. Jos ei, tarkista johdotus.
Vaihe 5: Lue AS5600: n tiedot
AS5600 tarjoaa 12-bittiset kulmatiedot I2C: n kautta. Voit käyttää seuraavaa Python -komentosarjaa kulma -asennon lukemiseen ja näyttämiseen.
Python -koodiesimerkki
import smbus2
import time
# Define I2C address and bus
AS5600_ADDR = 0x36
ANGLE_REG = 0x0E
bus = smbus2.SMBus(1)
def read_angle():
# Read two bytes from the angle register
raw_data = bus.read_i2c_block_data(AS5600_ADDR, ANGLE_REG, 2)
angle = (raw_data[0] << 8) | raw_data[1] # Combine MSB and LSB
angle = angle & 0x0FFF # Mask to 12 bits
return (angle / 4096.0) * 360.0 # Convert to degrees
try:
while True:
angle = read_angle()
print(f"Angle: {angle:.2f} degrees")
time.sleep(0.5)
except KeyboardInterrupt:
print("Exiting...")
Vaihe 6: AS5600: n sovellukset
AS5600 on monipuolinen ja sitä voidaan käyttää erilaisissa projekteissa:
- Robotiikka: Mittaa nivel- tai pyöräkulmat tarkan ohjauksen saavuttamiseksi.
- Kooderit: Luo DIY -kiertokoodereita CNC -koneisiin tai 3D -tulostimiin.
- Knupin ohjaimet: Käytä korkearesoluutioisena nupina äänenvoimakkuuden tai valikon navigoinnissa.
- Aseman seuranta: Seuraa kulmapaikkoja automaatiojärjestelmissä.
Vianetsintä
-
Laitetta ei havaittu:
- Varmista SDA- ja SCL -yhteydet.
- Varmista, että I2C on käytössä Raspberry PI: ssä.
- Tarkista AS5600: n toimintajännite.
-
Epätarkkojen lukemat:
- Varmista, että magneetti on kohdistettu oikein AS5600 -anturin kanssa.
- Käytä tarkkoja mittauksia halkaisijaisesti magnetoitua magneettia.
-
I2C -virheet:
- Tarkista ristiriitaiset laitteet I2C -väylässä käyttämällä
i2cdetect. - Varmista, että AS5600: n osoite vastaa komentosarjaa.
- Tarkista ristiriitaiset laitteet I2C -väylässä käyttämällä
Johtopäätös
AS5600-magneettinen kierto-anturi on tehokas ja helppokäyttöinen työkalu kulmien mittaamiseen. Seuraamalla tätä opasta, voit integroida AS5600: n Raspberry PI: n kanssa luodaksesi tarkat kiertomittausjärjestelmät robotiikkaan, automaatioon ja muihin. Kokeile erilaisia sovelluksia tämän monipuolisen anturin koko potentiaalin avaamiseksi!



































































































































