
BTS7960-moottorin ohjain on tehokas H-siltamoduuli, joka pystyy käsittelemään korkeita virtauksia, joten se on ihanteellinen DC-moottorien hallintaan robotti- ja automaatioprojekteissa. Tässä opetusohjelmassa opit kuinka yhdistää ja hallita BTS7960: ta vadelmapillä moottorin ajamiseksi.
Mitä tarvitset
- Raspberry Pi (Mikä tahansa malli, jolla on GPIO -ominaisuudet, esim. Pi 3, pi 4)
- BTS7960 Motor -ohjainmoduuli
- DC -moottori (Sopii projektiisi)
- Ulkoinen virtalähde (Moottorin jännitteen ja nykyisten vaatimusten mukainen)
- Leipälevy- ja hyppyjohdot
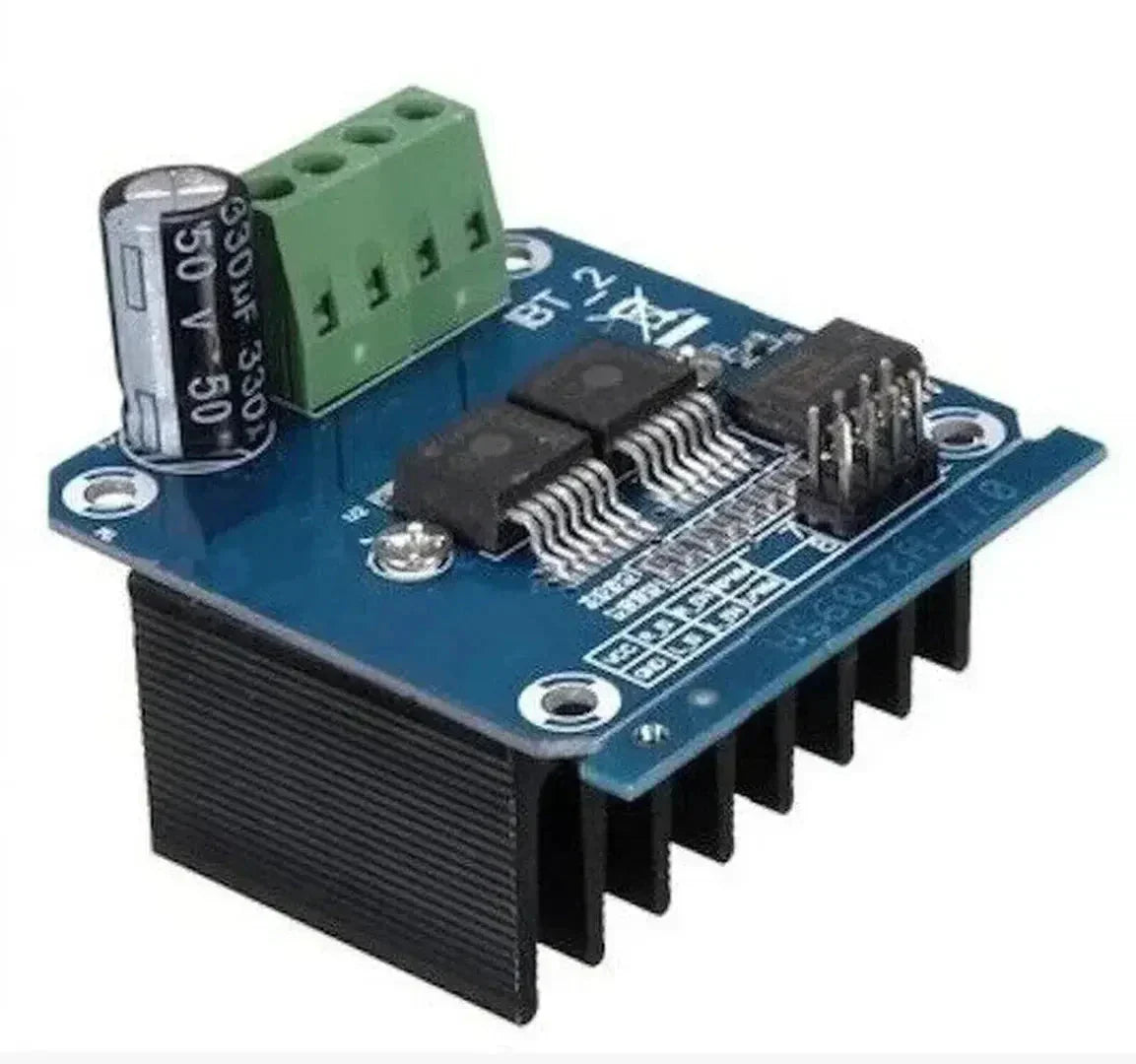
Vaihe 1: BTS7960 -moottorin ohjaimen ymmärtäminen
BTS7960-moduuli sisältää kaksi suuritehoista puolisidaa, jotka kykenevät ajamaan moottoreita, joiden virtaukset ovat jopa 43A. IT -ominaisuudet:
- PWM -syöttötapit nopeuden hallintaan
- Suuntaohjaustapit
- Ylivirta- ja lämpösuojaus
Pinot
| Nasta | Kuvaus |
|---|---|
| VCC | 5 V logiikan virtatulo |
| Hölynpöly | Pohja |
| Rpwm | PWM -tulo eteenpäin |
| Lpwm | PWM -tulo käänteiseen liikkeeseen |
| R_en | Ota PIN -nasta eteenpäin |
| L_en | Ota nasta käyttöön käänteiseen liikkeeseen |
| Moottori+ (m+) | Moottoripositiivinen terminaali |
| Moottori- (m-) | Moottorin negatiivinen terminaali |
| Virallinen | Ulkoinen moottorin virtalähde |
| GND (voima) | Maa moottorin virtalähteelle |
Vaihe 2: BTS7960: n johdotus Raspberry Pi: hen
Yhteydet
| BTS7960 -nasta | Raspberry Pi -tappi |
|---|---|
| VCC | 5V |
| Hölynpöly | Hölynpöly |
| Rpwm | GPIO18 (PWM -kanava 0) |
| Lpwm | GPIO19 (PWM -kanava 1) |
| R_en | GPIO23 |
| L_en | GPIO24 |
Moottori- ja virtalähteen liitännät
- Kytke moottoripäättimet Moottori+ (m+) ja Moottori- (m-) nastat.
- Kytke ulkoisen virtalähteen positiivinen pääte Virallinen.
- Kytke ulkoisen virtalähteen maadoitus GND (voima) pin.
Huomaa: Varmista, että ulkoinen virtalähde vastaa moottorin jännitettä ja nykyisiä vaatimuksia.
Vaihe 3: PWM: n mahdollistaminen Raspberry Pi: ssä
Moottorin nopeuden hallitsemiseksi käytät PWM: ää (pulssin leveyden modulaatio). Raspberry Pi GPIO -nastat 18 ja 19 tukevat laitteistoa PWM.
Ota PWM käyttöön Raspberry Pi -kokoonpanon kautta
- Avaa pääte ja ajo:
sudo raspi-config - Siirtyä jhk Käyttöliittymävaihtoehdot> P5: I2Cja ota i2c käyttöön.
- Tallenna ja käynnistä Raspberry Pi uudelleen:
sudo reboot
Vaihe 4: Python -koodin kirjoittaminen moottorin hallitsemiseksi
Asenna RPi.GPIO Kirjasto GPIO -nastajen hallitsemiseksi, ellei jo asennettu:
pip install RPi.GPIO
Esimerkki Python -koodi
Tämä esimerkki osoittaa, kuinka hallita moottorin nopeutta ja suuntaa BTS7960: n avulla.
import RPi.GPIO as GPIO
import time
# Pin Definitions
RPWM_PIN = 18
LPWM_PIN = 19
REN_PIN = 23
LEN_PIN = 24
# GPIO Setup
GPIO.setmode(GPIO.BCM)
GPIO.setup(RPWM_PIN, GPIO.OUT)
GPIO.setup(LPWM_PIN, GPIO.OUT)
GPIO.setup(REN_PIN, GPIO.OUT)
GPIO.setup(LEN_PIN, GPIO.OUT)
# PWM Setup
frequency = 1000 # PWM frequency in Hz
rpwm = GPIO.PWM(RPWM_PIN, frequency)
lpwm = GPIO.PWM(LPWM_PIN, frequency)
# Start PWM with 0% duty cycle (off)
rpwm.start(0)
lpwm.start(0)
try:
while True:
# Enable Forward Motion
GPIO.output(REN_PIN, GPIO.HIGH)
GPIO.output(LEN_PIN, GPIO.LOW)
# Set forward speed (50% duty cycle)
rpwm.ChangeDutyCycle(50)
lpwm.ChangeDutyCycle(0)
time.sleep(2)
# Enable Reverse Motion
GPIO.output(REN_PIN, GPIO.LOW)
GPIO.output(LEN_PIN, GPIO.HIGH)
# Set reverse speed (30% duty cycle)
rpwm.ChangeDutyCycle(0)
lpwm.ChangeDutyCycle(30)
time.sleep(2)
except KeyboardInterrupt:
print("Stopping motor...")
finally:
rpwm.stop()
lpwm.stop()
GPIO.cleanup()
Vaihe 5: Asennusten testaaminen
- Kytke moottori ja virtalähde.
- Suorita Python -käsikirjoitus:
python3 bts7960_control.py - Tarkkaile moottorin vaihtavaa nopeutta ja suuntaa ohjelmoituna.
Vianetsintä
-
Moottori ei käynnissä:
- Tarkista johdotusliitännät.
- Varmista ulkoinen virtalähde.
-
PWM ei toimi:
- Varmista, että GPIO18 ja GPIO19 on määritetty PWM: lle.
- Tarkista komentosarjan käyttöjakson arvot.
-
Ylikuumentava moduuli:
- Varmista, että moottorin nykyinen veto ei ylitä BTS7960: n luokitusta.
BTS7960: n sovellukset Raspberry PI: llä
- ROBOTIIKAN HALLITTAVAT DC-moottorien hallinta
- Automatisoitujen ajoneuvojen tai robotien rakentaminen
- Motorisoitujen järjestelmien luominen teollisiin sovelluksiin
- Kauko-ohjattujen järjestelmien kehittäminen
Johtopäätös
BTS7960-moottorin kuljettaja on vankka ja tehokas ratkaisu korkeavirtamoottorien ajamiseen. Yhdistettynä Raspberry PI: n GPIO -ominaisuuksiin se avaa lukuisia mahdollisuuksia robotti- ja automaatioprojekteihin. Seuraamalla tätä opasta voit määrittää ja hallita BTS7960: ta tehokkaiden moottorijärjestelmien luomiseksi. Kokeile erilaisia PWM -taajuuksia ja työsyklejä suorituskyvyn optimoimiseksi tietylle sovelluksellesi!



































































































































