L9110S -moottorin ohjain on kompakti ja tehokas ratkaisu DC -moottorien ja askelmoottorien ohjaamiseen Arduino -projektissa. Rakennatpa yksinkertaista robottia tai monimutkaisempaa automaatiojärjestelmää, L9110S tarjoaa luotettavan tavan hallita moottoritoimintoja minimaalisen johdotuksen ja ohjelmoinnin monimutkaisuuden avulla. Tässä blogikirjoituksessa tutkimme L9110S -moottoriohjaimen ominaisuuksia, kuinka yhdistää se Arduinoon ja tarjota näytekoodi aloittaaksesi.
Mikä on L9110: t?
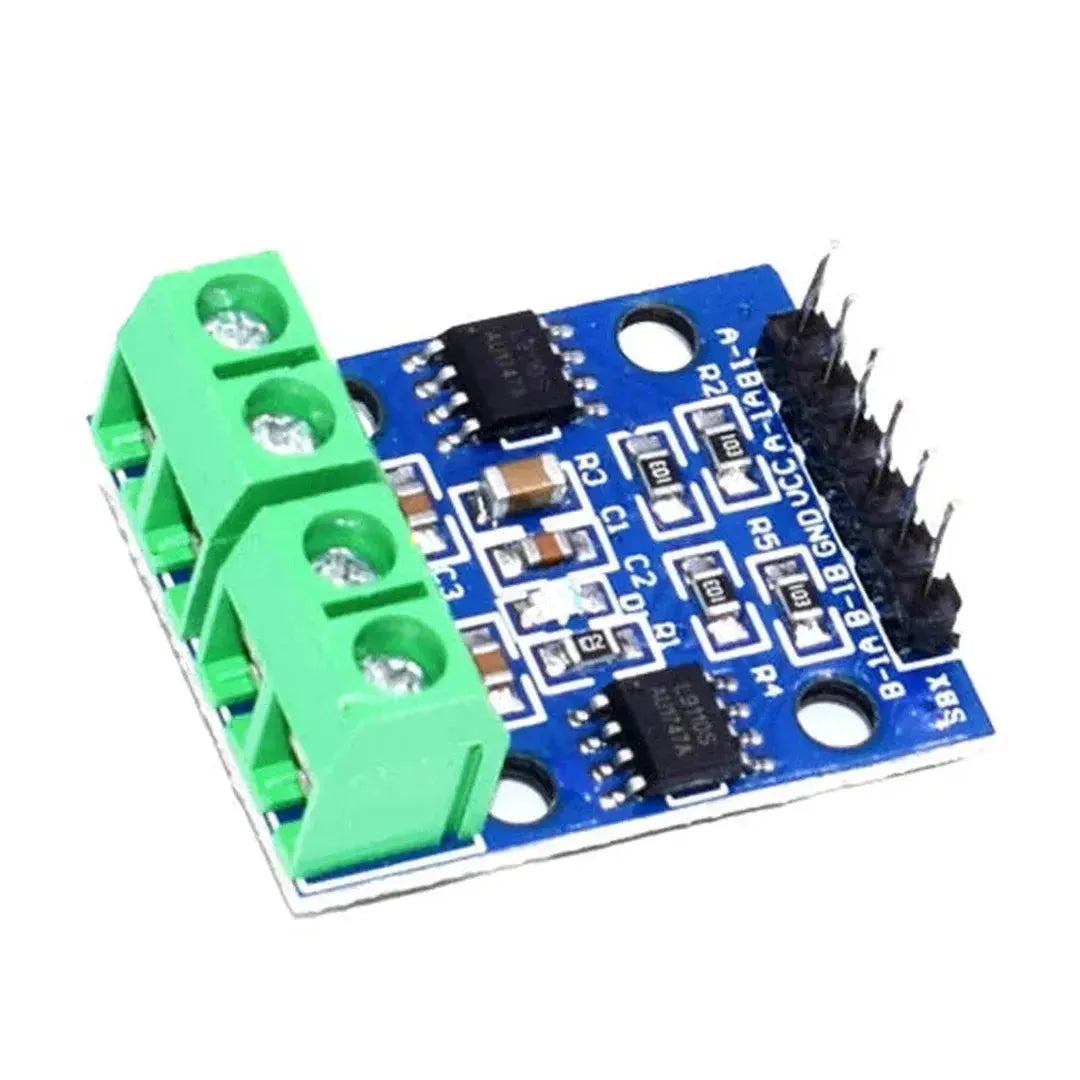
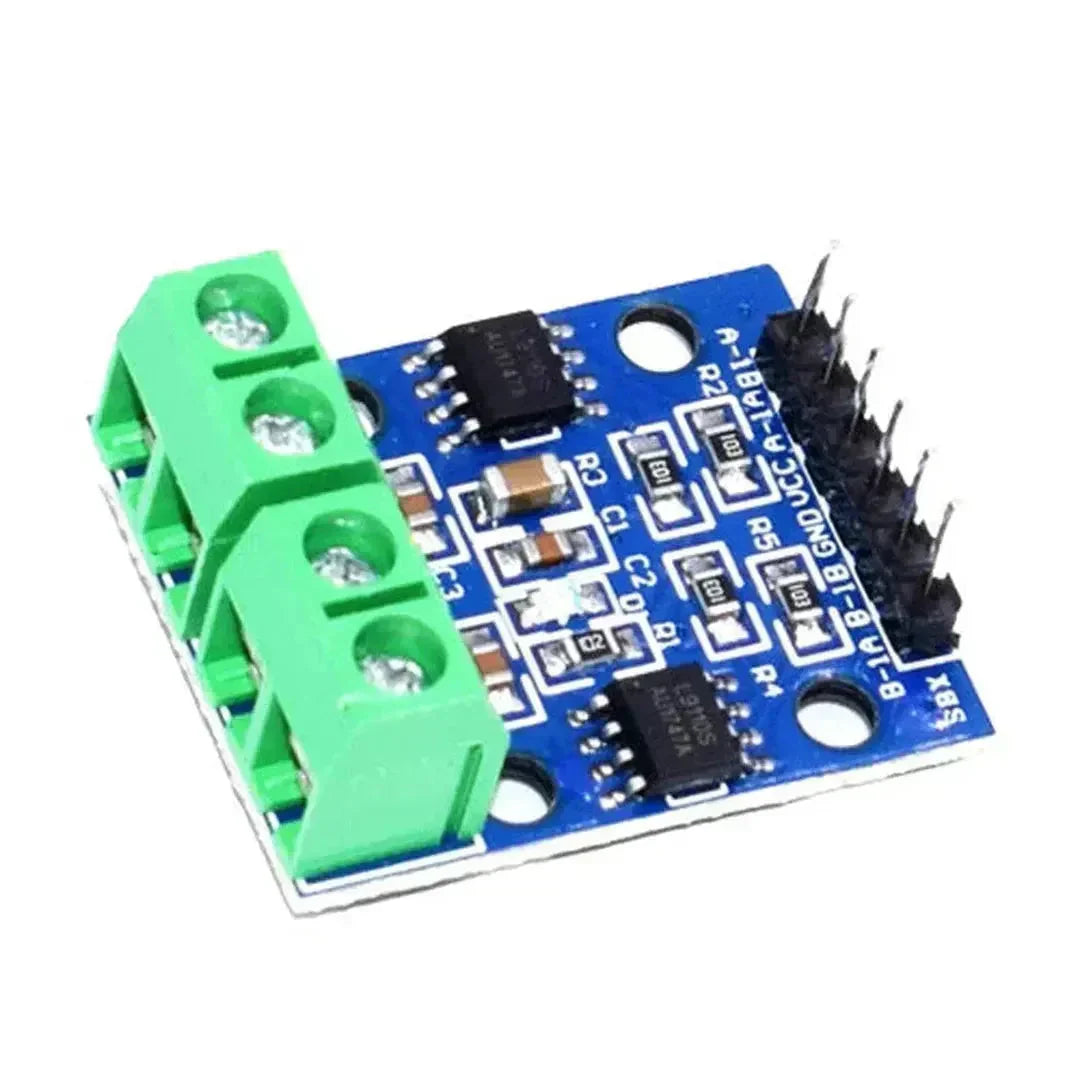
L9110S on kaksikanavaisen moottorin ohjaimen IC, joka on suunniteltu hallitsemaan kahden tasavirtamoottorin tai yhden askelmoottorin nopeutta ja suuntaa. Se toimii jännitealueella 2,5 V - 12 V, joten se on monipuolinen eri sovelluksille. L9110: t tunnetaan kompaktista koosta, pienestä tehonkulutuksestaan ja integroinnin helppoudesta mikrokontrollereihin, kuten Arduino.
Miksi valita L9110: t?
- Kompakti suunnittelu: Sen pieni jalanjälki tekee siitä ihanteellisen projektille, jolla on rajoitetusti tilaa.
- Kaksoiskanavat: Hallitse kahta moottoria itsenäisesti, mikä mahdollistaa monimutkaiset liikkeet.
- Helppo käyttää: Yksinkertainen käyttöliittymä selkeällä merkinnällä helppoja yhteyksiä.
- Kustannustehokas: Edullinen hinnoittelu vaarantamatta toiminnallisuutta.
L9110: n yhdistäminen Arduinoon
L9110: n asettaminen arduinolla on suoraviivaista. Alla on vaiheittainen opas yhteyksien luomiseen:
-
Virtayhteydet:
- Yhdistä
VCCL9110: n nasta Arduinon 5 V -nastaan. - Yhdistä
GNDL9110: n nasta Arduinon GND -nastaan.
- Yhdistä
-
Moottoriyhteydet:
- Kytke ensimmäinen moottori
OUT1jaOUT2nastat. - Jos käytät toista moottoria, kytke se
OUT3jaOUT4nastat.
- Kytke ensimmäinen moottori
-
Hallintatapit:
- Yhdistä
AIN1jaAIN2nastat kahteen digitaaliseen nastaan Arduinossa (esim. Nastat 2 ja 3). - Jos käytät toista moottoria, kytke
BIN1jaBIN2kahdelle muulle digitaaliselle nastalle (esim. nastat 4 ja 5).
- Yhdistä
Katso alla olevasta kaaviosta visuaalinen esitys yhteyksistä:

Arduino -ohjelmointi
Laitteiston asettamisen jälkeen seuraava askel on ohjelmoida Arduino moottorien hallitsemiseksi. Alla on näytekoodi, joka osoittaa, kuinka DC -moottorin suuntaa ja nopeutta voidaan hallita L9110S -moottorin ohjaimella.
// Define motor control pins
const int AIN1 = 2;
const int AIN2 = 3;
// Setup function
void setup() {
// Initialize the motor control pins as outputs
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
}
// Loop function
void loop() {
// Rotate motor forward
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
// Rotate motor backward
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
}
Selitys:
-
AIN1jaAIN2käytetään moottorin suunnan ohjaamiseen. - Asetus
AIN1Korkea jaAIN2Matala kiertää moottoria eteenpäin. - Asetus
AIN1Matala jaAIN2Korkea kiertää moottoria taaksepäin. - Molemmat asettavat
AIN1jaAIN2Matala pysäyttää moottorin.
Nopeuden hallinta PWM: llä
L9110: t tukevat PWM: ää (pulssin leveyden modulaatio) nopeuden hallintaan. Vaihtelemalla PWM -signaalin työjaksoa, voit säätää moottorin nopeutta. Näin voidaan muokata edellistä koodia nopeudenhallinnan sisällyttämiseksi:
// Define motor control pins
const int AIN1 = 2;
const int AIN2 = 3;
const int PWM_PIN = 9; // PWM pin for speed control
// Setup function
void setup() {
// Initialize the motor control pins as outputs
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(PWM_PIN, OUTPUT);
}
// Loop function
void loop() {
// Set speed to 150 out of 255
analogWrite(PWM_PIN, 150);
// Rotate motor forward
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
// Rotate motor backward
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
}
Selitys: Se analogWrite() Toiminto lähettää PWM -signaalin moottorille, jolloin voit hallita sen nopeutta. Arvo vaihtelee välillä 0 (STOP) - 255 (täysi nopeus).
L9110: n sovellukset Arduinon kanssa
L9110S -moottorin ohjaimen ja Arduinon yhdistelmä avaa laajan valikoiman projektimahdollisuuksia:
- Robotiikka: Hallitse robottivarsien tai liikkuvien robottien liikettä tarkalla moottorin ohjauksella.
- Automaatiojärjestelmät: Automatisoivat tehtävät, kuten ovien avaaminen/sulkeminen, venttiilien säätäminen tai asennuslinjojen liikkuvat komponentit.
- DIY -projektit: Luo mukautettuja elektroniikkaprojekteja, kuten moottoroituja kameran liukusäätimiä, automaattisia kasvien kastelujärjestelmiä tai kauko-ohjattavia ajoneuvoja.
- Koulutustyökalut: Opeta opiskelijoille moottorin hallintaa, elektroniikkaa ja ohjelmointia käytännön hankkeiden kautta.
Johtopäätös
L9110S-moottorin ohjain on monipuolinen ja käyttäjäystävällinen komponentti kaikille, jotka haluavat hallita moottoreita Arduinon avulla. Sen kaksikanavainen kyky yhdistettynä johdotuksen ja ohjelmoinnin yksinkertaisuuteen tekee siitä erinomaisen valinnan sekä aloittelijoille että kokeneille harrastajille. Seuraamalla tässä viestissä esitettyjä vaiheita voit integroida nopeasti moottorin ohjauksen projekteihisi ja laajentaa Arduino-pohjaisten järjestelmien toiminnallisuutta.
Kokeile erilaisia moottorin nopeuksia, ohjeita ja sovelluksia L9110S -moottorin ohjaimen potentiaalin hyödyntämiseksi kokonaan. Hyvää tinking!