





MCP2515 on tölkki (ohjaimen alueverkko) väylämoduuli, jota käytetään laajasti auto- ja teollisuusviestinnässä. Sen avulla Arduino voi liittyä tölkkipohjaisiin järjestelmiin, jotka lähetetään ja vastaanottaa tietoja tehokkaasti. Tämä opetusohjelma opastaa sinut MCP2515 -moduulin määrittämiseen ja käyttämiseen Arduinon kanssa.
Mitä tarvitset
- MCP2515 CAN Bus -moduuli
- Arduino Board (esim. UNO, Mega, Nano)
- CAN-BUS-yhteensopiva laite tai muu MCP2515-moduuli
- Hyppyjohdot
- Leipälevy (valinnainen)
- Tietokone, jossa Arduino IDE on asennettu
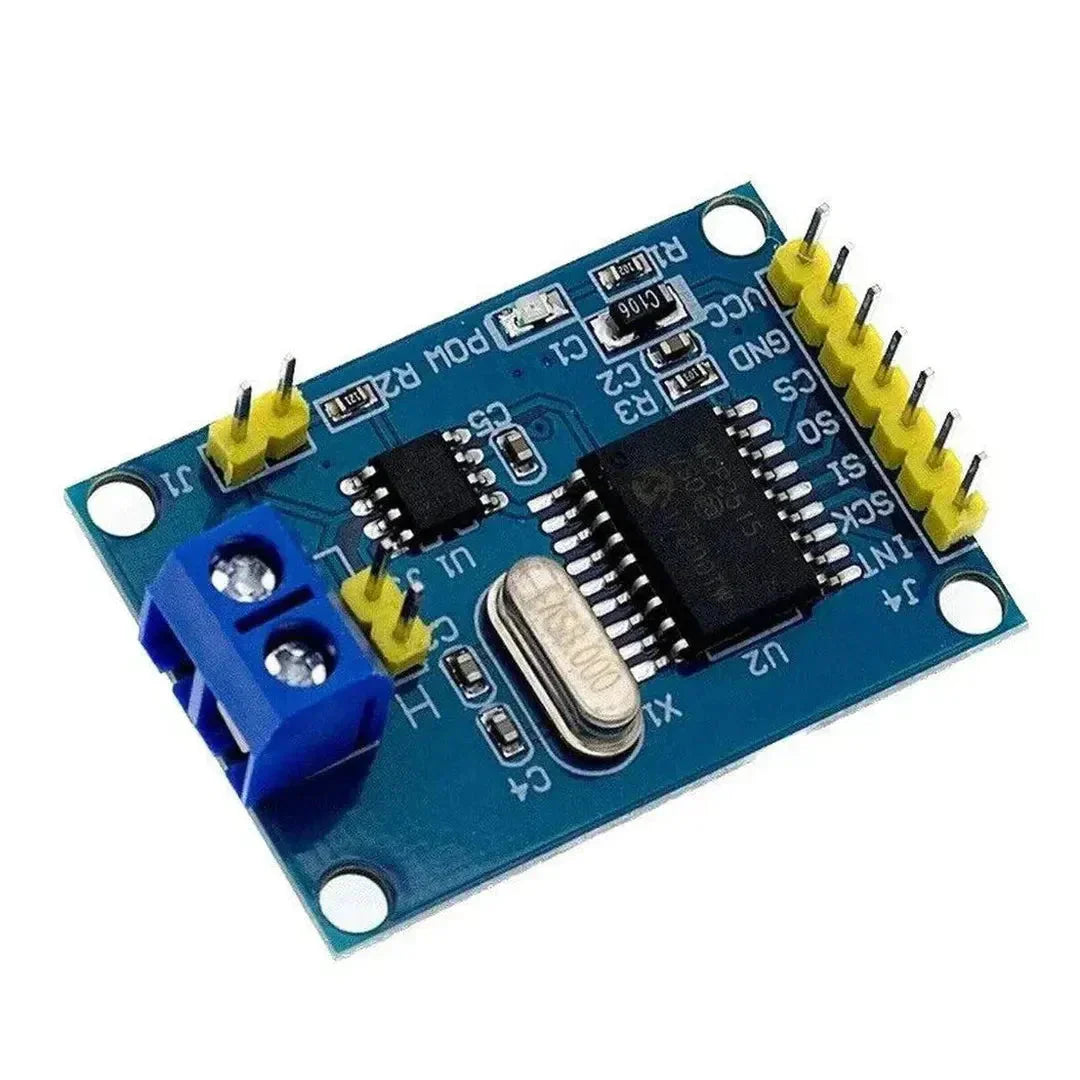
Vaihe 1: MCP2515 -moduulin ymmärtäminen
MCP2515 -moduuli käyttää MCP2515 CAN Controller IC: tä ja TJA1050: tä Can lähetinvastaanottimen. Moduuli kommunikoi Arduinon kanssa SPI -rajapinnan kautta.
MCP2515 Pinout
| Nasta | Funktio |
|---|---|
| VCC | Virtalähde (5 V) |
| Hölynpöly | Pohja |
| CS | Chip Select |
| NIIN | SPI -datan lähtö |
| SI | SPI -datan syöttö |
| Sck | SPI -kello |
| Int | Keskeyttää lähtö |
Vaihe 2: MCP2515: n johdotus Arduinolle
Alla on johdotusopas MCP2515 -moduulin kytkemiseksi Arduino UNO: lle:
| MCP2515 -nasta | Arduino -nasta |
|---|---|
| VCC | 5V |
| Hölynpöly | Hölynpöly |
| CS | Nasta 10 |
| NIIN | Nasta 12 |
| SI | Nasta 11 |
| Sck | Nasta 13 |
| Int | Nasta 2 |
Huomaa: Varmista muille Arduino -levyille, että SPI -nastat vastaavat lautasi.
Vaihe 3: Asenna vaadittu kirjasto
Se MCP_CAN Kirjasto yksinkertaistaa vuorovaikutusta MCP2515 -moduulin kanssa.
Vaiheet asentaaksesi MCP_Can -kirjasto:
- Avaa Arduino IDE.
- Mennä jhk Luonnos > Sisällytä kirjasto > Hallitse kirjastoja.
- Etsi "MCP_CAN" kirjastonhallinnasta.
- Napsauttaa Asentaa.
Vaihe 4: Lataa koodi
Lähettimen koodi (tietojen lähettäminen tölkkiväylälle):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
if (CAN.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully");
} else {
Serial.println("Error Sending Message");
}
delay(1000); // Send data every second
}
Vastaanotinkoodi (tietojen lukeminen tölkkiväylältä):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char len = 0;
unsigned char buf[8];
if (CAN.checkReceive() == CAN_MSGAVAIL) {
CAN.readMsgBuf(&len, buf);
unsigned long id = CAN.getCanId();
Serial.print("Message ID: 0x");
Serial.println(id, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
Vaihe 5: Testaa asennus
- Kytke MCP2515 -moduuli Arduinoosi vaiheessa 2 kuvatulla tavalla.
- Lataa lähetinkoodi yhdelle Arduinolle ja vastaanotinkoodille toiseen Arduinoon.
- Kytke molempien MCP2515 -moduulien CAN_H- ja CAN_L -nastat tölkkiväylän luomiseksi.
- Avaa sarjamonitori molemmissa arduinoissa ja aseta baudinopeus
115200. - Vastaanottimen Arduinossa sinun pitäisi nähdä lähettimen Arduinon lähettämät viestit.
Vianetsintä
- Tietoja ei vastaanotettu: Tarkista moduulien CAN_H- ja CAN_L -yhteydet.
- Alustaminen epäonnistui: Varmista, että SPI -yhteydet ja CS -nasta vastaavat asennusta.
- Välitön viestintä: Varmista, että molemmat moduulit käyttävät samaa baud -määrää (tässä esimerkissä 500 kbps).
MCP2515 CAN -väylämoduulin sovellukset
- Ajoneuvojen diagnostiikka (OBD-II)
- Teollisuusautomaatiojärjestelmät
- Robottiviestintä
- IoT -laitteet, joissa on CAN -linja -autoverkot
Johtopäätös
Olet määrittänyt onnistuneesti MCP2515 CAN Bus -moduulin Arduinolla tietojen lähettämistä ja vastaanottamista varten. Tämä moduuli on uskomattoman monipuolinen sovelluksille, jotka vaativat luotettavaa viestintää tölkkiväylän kautta. Kokeile erilaisia viestitunnuksia ja tietojen hyötykuormia tutkiaksesi sen koko potentiaalia!

















































































































































