L'Arduino CNC Shield V3.0 est un bouclier populaire conçu pour simplifier le contrôle des machines CNC comme les imprimantes 3D, les coupe-laser et les moulures. Associé à des pilotes d'arduino et de moteur pas à pas, il permet un contrôle précis de plusieurs axes. Dans ce tutoriel, nous vous guiderons à travers la configuration et l'utilisation du CNC Shield V3.0 avec Arduino.
Ce dont vous aurez besoin
- Board Arduino (par exemple, UNO)
- CNC Shield V3.0
- Conducteurs de moteur pas à pas (par exemple, A4988 ou DRV8825)
- Moteurs pas à pas
- Alimentation externe (12V-36V pour les moteurs)
- Fils de cavalier (facultatif)
- Firmware GRBL (firmware CNC open source)
- Un ordinateur avec l'ide Arduino installé
Étape 1: Comprendre le CNC Shield V3.0
Le CNC Shield V3.0 est conçu pour la compatibilité avec l'Arduino Uno et prend en charge GRBL, un micrologiciel open source pour contrôler les machines CNC. Les caractéristiques clés comprennent:
- Support pour jusqu'à 4 axes (x, y, z, a).
- Prise en charge du microStepping via la configuration du pilote de moteur pas à pas.
- Épingles pour les interrupteurs de limite et un bouton d'arrêt d'urgence.
- En-têtes pour les pilotes de moteur pas à pas (A4988 ou DRV8825).
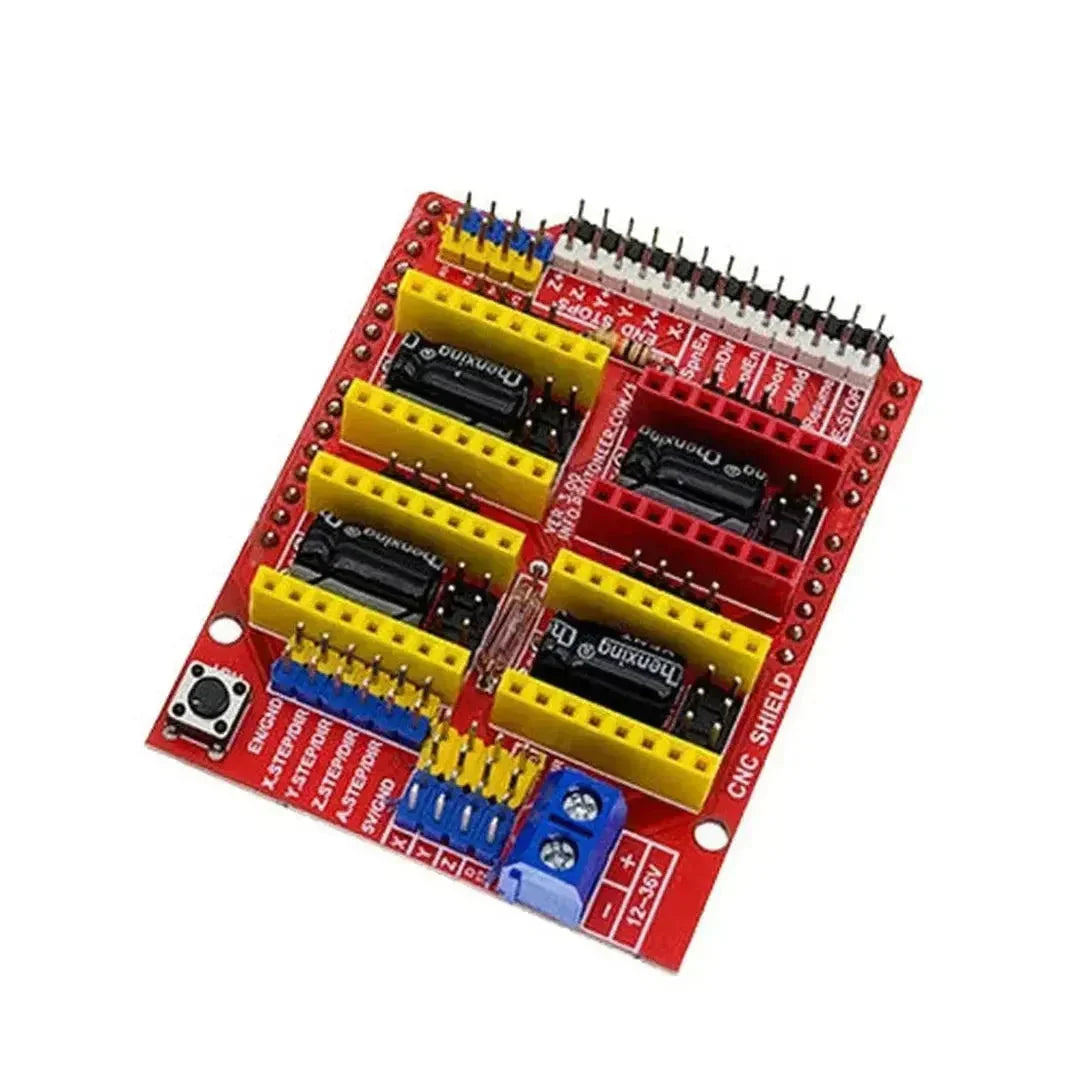
CNC Shield V3.0 Disposition
- Sorties de moteur pas à pas: Connectez vos moteurs pas à pas aux en-têtes étiquetés X, Y, Z et un en-têtes.
- Emplacements du conducteur: Installez les pilotes de moteur pas à pas (par exemple, A4988) dans les machines à sous X, Y, Z et les fentes.
- Entrées de l'interrupteur de limite: Connectez les commutateurs de limite à leurs broches correspondantes.
- Entrée d'alimentation: Utilisez une alimentation externe (12V-36V) pour les moteurs.
Étape 2: assembler le bouclier
-
Installez les pilotes de moteur pas à pas:
- Insérez chaque pilote de moteur pas à pas dans les machines à sous étiquetées X, Y, Z et A. Assurez-vous que l'orientation correspond au diagramme fourni avec le bouclier (généralement avec le potentiomètre face à l'extérieur).
- Fixez les dissipateurs thermiques aux copeaux du conducteur pour une meilleure dissipation de chaleur.
-
Définir le microste:
- Utilisez des cavaliers sur le bouclier pour configurer le microstepping pour chaque axe. Reportez-vous à la fiche technique du pilote pour les configurations de microstepping (par exemple, 1/16 ou 1/32 étapes).
-
Connectez les moteurs pas à pas:
- Fixez les fils du moteur pas à pas aux sorties X, Y, Z et une sortie sur le bouclier.
-
Alimentation:
- Connectez une alimentation externe à l'entrée d'alimentation du bouclier (12V-36V). Assurez-vous que vos moteurs sont compatibles avec la tension.
-
Attacher à Arduino:
- Placez le CNC Shield V3.0 sur le dessus de l'Arduino Uno, alignant les épingles.
Étape 3: Installez le firmware GRBL sur Arduino
-
Télécharger le firmware GRBL:
- Visitez le référentiel officiel de GRBL GitHub: GRBL GITHUB.
- Téléchargez la dernière version.
-
Installez la bibliothèque GRBL dans Arduino IDE:
- Ouvrez l'ide Arduino.
- Aller à Esquisser > Inclure la bibliothèque > Ajouter une bibliothèque .zip.
- Sélectionnez le dossier GRBL téléchargé.
-
Téléchargez GRBL vers Arduino:
- Ouvrez l'ide Arduino et sélectionnez Déposer > Exemples > trbl > palette.
- Sélectionnez le bon Conseil et Port sous Outils menu.
- Faire un clic Télécharger Pour charger GRBL sur l'Arduino.
Étape 4: Configurer les paramètres GRBL
-
Connectez-vous à GRBL:
- Utilisez un outil de communication série comme le moniteur série Arduino ou un logiciel de contrôle CNC dédié (par exemple, expéditeur GCODE universel).
- Réglez le taux en bauds sur
115200.
-
Tester GRBL:
- Envoyer la commande
$$Pour afficher les paramètres GRBL actuels. - Ajustez les paramètres comme les étapes par millimètre, les taux d'alimentation et l'accélération au besoin. Par exemple:
$100=250.0 (X-axis steps/mm) $101=250.0 (Y-axis steps/mm) $102=250.0 (Z-axis steps/mm)
- Envoyer la commande
-
Activer les commutateurs de limite (facultatif):
- Connectez les commutateurs de limite au bouclier et les activez dans les paramètres de GRBL:
$21=1 (Enable hard limits) $22=1 (Enable homing)
- Connectez les commutateurs de limite au bouclier et les activez dans les paramètres de GRBL:
Étape 5: Testez le bouclier CNC
-
Ouvrez un programme de contrôle CNC:
- Utilisez un logiciel comme Universal Gcode Sender (UGS) pour contrôler le bouclier CNC.
-
Déplacez les moteurs:
- Utilisez des contrôles manuels dans le logiciel pour déplacer les axes x, y et z. Vérifiez que les moteurs pas à pas répondre correctement.
-
Chargez un fichier de code G:
- Testez la configuration en chargeant un exemple de fichier de code G et en l'exécutant dans le logiciel.
Dépannage
-
Les moteurs pas à pas ne bougent pas:
- Vérifiez l'orientation du conducteur et assurez-vous que les cavaliers sont définis pour le microste.
- Vérifiez que l'alimentation externe est connectée et fonctionnelle.
-
Mouvement erratique:
- Vérifiez les connexions du moteur et réduisez les paramètres d'accélération dans GRBL.
-
Conducteurs de surchauffe:
- Assurez-vous que les dissipateurs thermiques appropriés sont installés et envisagez d'utiliser un ventilateur de refroidissement.
Applications de CNC Shield V3.0
- Routeurs cnc de bricolage
- Imprimantes 3D
- Graveurs laser
- Comploteurs
Conclusion
Vous avez réussi à configurer le Arduino CNC Shield V3.0 pour une utilisation avec GRBL. Ce bouclier facilite le contrôle des moteurs pas à pas et la construction de votre propre machine CNC. Expérimentez avec différentes configurations et commencez à donner vie à vos projets CNC!














1 commentaire
Do you have any information regarding how to wire and configure system for dual end stop limit installations?