
Le Vl53l0x est un capteur de temps de vol (TOF) qui mesure les distances avec précision à l'aide de la technologie laser. Il est couramment utilisé dans les applications de robotique, d'automatisation et de détection d'obstacles. Ce guide vous guidera dans la configuration et l'utilisation du VL53L0X avec un Raspberry Pi.
Ce dont vous aurez besoin
- Raspberry Pi (Tout modèle avec le support GPIO, par ex., PI 3, PI 4)
- Module de capteur de distance VL53L0X
- Fils de planche à pain et de cavalier
- Python installé sur le Raspberry Pi
Étape 1: Câblage du VL53L0X au Raspberry Pi
Le VL53L0X communique via I2C, nous devons donc le connecter aux broches I2C de Raspberry Pi.
Relations
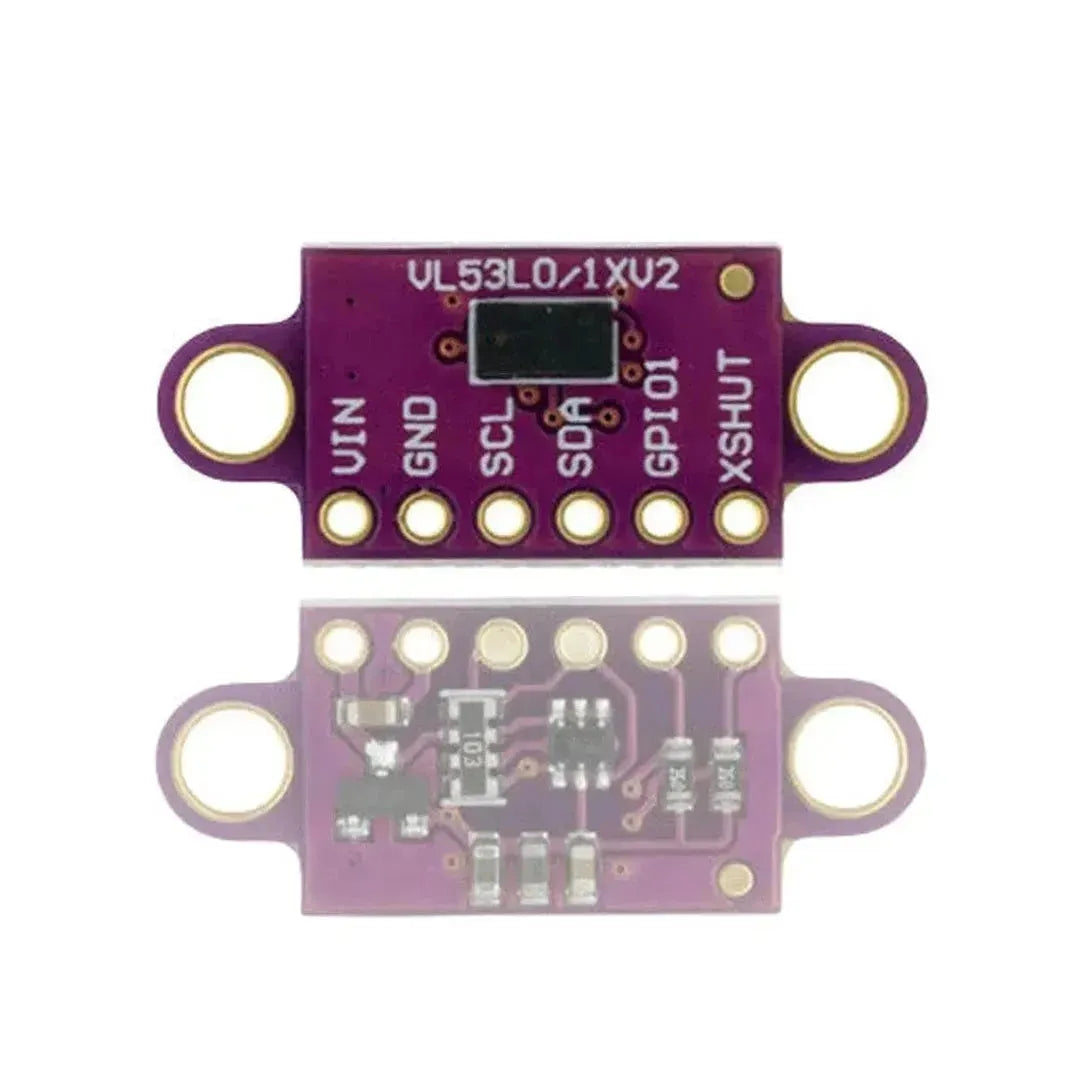
| Broche vl53l0x | Pin de framboise PI |
|---|---|
| VCC | 3.3V (broche 1) |
| GND | Terre (broche 6) |
| SDA | SDA (broche 3, gpio2) |
| SCL | SCL (broche 5, gpio3) |
| Xshut (facultatif) | Tout gpio (pour activer / désactiver le capteur) |
Étape 2: Activer I2C sur le Raspberry Pi
Étant donné que le VL53L0X communique sur I2C, nous devons activer l'interface I2C.
-
Ouvrez l'outil de configuration Raspberry Pi:
sudo raspi-config -
Se diriger vers Options d'interface> I2C et l'activer.
-
Redémarrez le Raspberry Pi:
sudo reboot -
Vérifiez que le capteur est détecté en fonctionnant:
sudo i2cdetect -y 1Le VL53L0X devrait apparaître à 0x29.
Étape 3: Installez les bibliothèques requises
- Mettez à jour la liste des packages de Raspberry Pi:
sudo apt update && sudo apt upgrade -y - Installez les bibliothèques Python nécessaires:
sudo apt install -y python3-pip i2c-tools python3-smbus pip3 install adafruit-circuitpython-vl53l0x
Étape 4: Lire les données de distance du VL53L0X
Voici un script Python pour mesurer les distances à l'aide du capteur VL53L0X.
Exemple de code python
import time
import board
import busio
import adafruit_vl53l0x
# Initialize I2C and VL53L0X sensor
i2c = busio.I2C(board.SCL, board.SDA)
vl53 = adafruit_vl53l0x.VL53L0X(i2c)
try:
while True:
distance = vl53.range # Read distance in millimeters
print(f"Distance: {distance} mm")
time.sleep(1)
except KeyboardInterrupt:
print("Exiting...")
Étape 5: Applications du VL53L0X
- Détection d'obstacles - Utiliser dans la robotique et les véhicules autonomes pour détecter les objets.
- Détection de proximité - Automatiser les portes, les systèmes de sécurité ou les applications IoT.
- Mesure de niveau - Surveillez le niveau de liquide dans un conteneur.
- Reconnaissance des gestes - Suivez les mouvements de la main pour les interfaces sans contact.
Dépannage
-
Dispositif non détecté (
i2cdetectne montre pas0x29)- Vérifiez le câblage de SDA / SCL broches.
- Assurez-vous que l'interface I2C est activée sur le Raspberry Pi.
-
Lectures inexactes
- Assurez-vous que le capteur n'est pas obstrué.
- Évitez les surfaces réfléchissantes qui peuvent provoquer des lectures incorrectes.
-
Plusieurs capteurs VL53L0X
- Utiliser le Xshut PIN pour attribuer différentes adresses I2C à plusieurs capteurs VL53L0X.
Conclusion
Le VL53L0X est un puissant capteur de distance à base de laser qui s'intègre parfaitement au Raspberry Pi. En suivant ce guide, vous pouvez mesurer avec précision les distances pour la robotique, l'automatisation et les projets IoT. Expérimentez avec différentes applications pour débloquer son plein potentiel! 🚀

















































































































































