נהג המנוע BTS7960 הוא מודול H-Bridge חזק המסוגל לטפל בזרמים גבוהים, מה שהופך אותו לאידיאלי לבקרת מנועי DC בפרויקטים של רובוטיקה ואוטומציה. במדריך זה תלמד כיצד לחבר ולשלוט ב- BTS7960 עם פטל PI כדי להניע מנוע.
מה תצטרך
- Raspberry Pi (כל דגם עם יכולות GPIO, למשל, pi 3, pi 4)
- BTS7960 מודול מנהל התקן המנוע
- מנוע DC (מתאים לפרויקט שלך)
- ספק כוח חיצוני (התאמת דרישות המתח והזרם של המנוע שלך)
- חוטי לחם וגשר
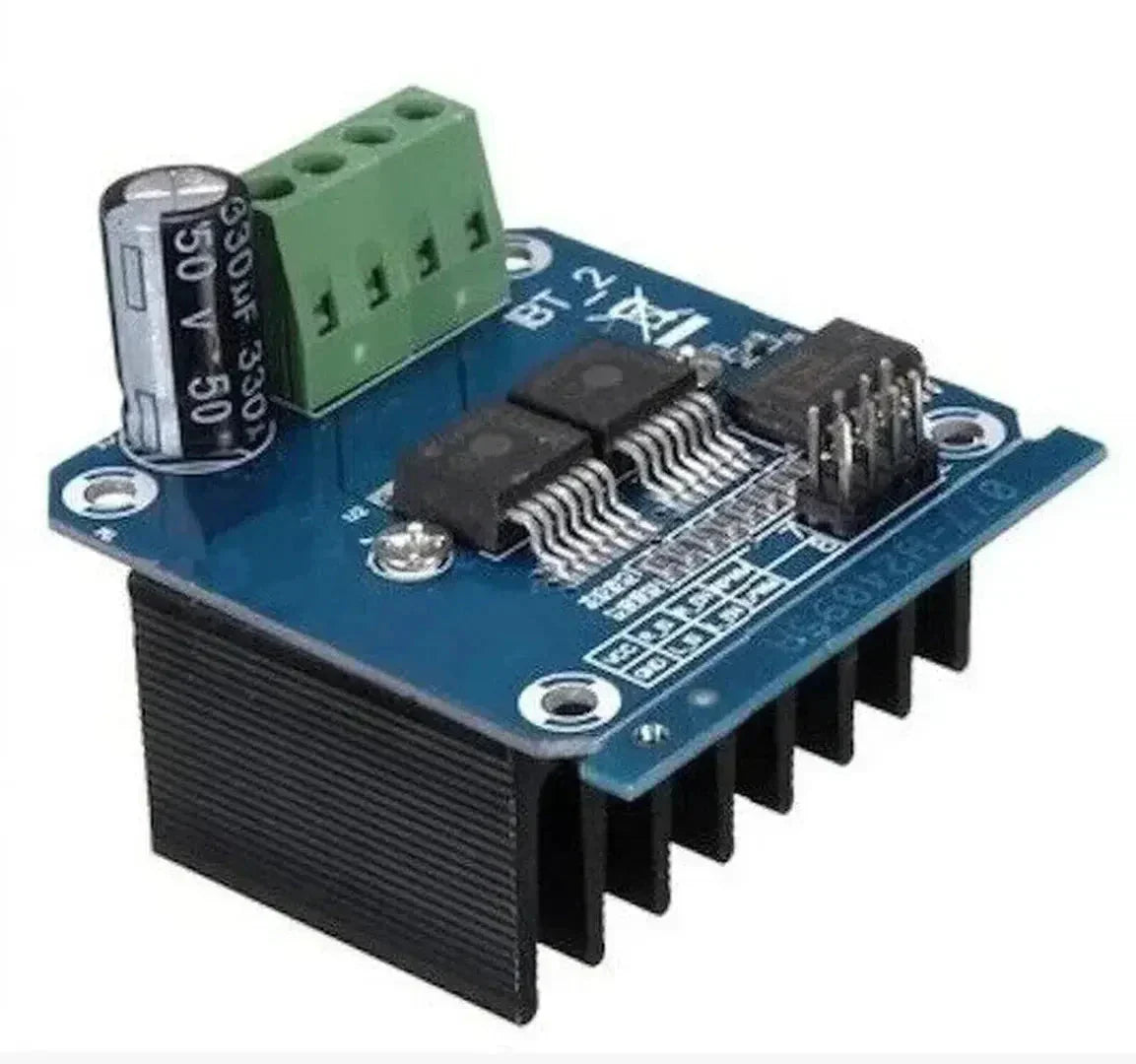
שלב 1: הבנת הנהג BTS7960
מודול BTS7960 כולל שני חצי גשרים בעלי עוצמה גבוהה המסוגלים לנהוג במנועים עם זרמים עד 43A. זה כולל:
- סיכות קלט PWM לבקרת מהירות
- סיכות בקרת כיוון
- הגנה על זרם יתר והגנה תרמית
Pinout
| פִּין | תֵאוּר |
|---|---|
| VCC | קלט כוח לוגיקה 5V |
| GND | טָחוּן |
| RPWM | קלט PWM לתנועה קדימה |
| LPWM | כניסת PWM לתנועה הפוכה |
| R_en | אפשר סיכה לתנועה קדימה |
| L_en | אפשר סיכה לתנועה הפוכה |
| מנוע+ (m+) | מסוף חיובי מוטורי |
| מנוע- (m-) | מסוף שלילי מוטורי |
| VIN | אספקת חשמל מוטורית חיצונית |
| GND (כוח) | קרקע לאספקת חשמל מוטורית |
שלב 2: חיווט BTS7960 ל- Raspberry Pi
חיבורים
| BTS7960 PIN | סיכת פטל pi |
|---|---|
| VCC | 5V |
| GND | GND |
| RPWM | GPIO18 (PWM ערוץ 0) |
| LPWM | GPIO19 (PWM ערוץ 1) |
| R_en | GPIO23 |
| L_en | GPIO24 |
חיבורי מנוע ואספקת חשמל
- חבר את מסופי המנוע ל מנוע+ (m+) וכן מנוע- (m-) סיכות.
- חבר את הטרמינל החיובי של אספקת החשמל החיצונית ל VIN.
- חבר את הקרקע של ספק הכוח החיצוני אל GND (כוח) פִּין.
פֶּתֶק: ודא שאספקת החשמל החיצונית תואמת את דרישות המתח והזרם של המנוע שלך.
שלב 3: הפעלת PWM ב- Raspberry Pi
כדי לשלוט על מהירות המנוע, תשתמש ב- PWM (אפנון רוחב הדופק). סיכות Raspberry Pi Gpio 18 ו -19 תומכות ב- PWM חומרה.
הפעל PWM באמצעות תצורת Raspberry Pi
- פתח את הטרמינל והפעל:
sudo raspi-config - נווט אל אפשרויות ממשק> p5: i2c, ומאפשר i2c.
- שמור ואתחל מחדש את ה- Raspberry Pi:
sudo reboot
שלב 4: כתיבת קוד פייתון כדי לשלוט במנוע
התקן את RPi.GPIO ספרייה לשליטה על סיכות GPIO אם כבר לא הותקנה:
pip install RPi.GPIO
דוגמה קוד פייתון
דוגמה זו מדגימה כיצד לשלוט במהירות ובכיוון של המנוע באמצעות BTS7960.
import RPi.GPIO as GPIO
import time
# Pin Definitions
RPWM_PIN = 18
LPWM_PIN = 19
REN_PIN = 23
LEN_PIN = 24
# GPIO Setup
GPIO.setmode(GPIO.BCM)
GPIO.setup(RPWM_PIN, GPIO.OUT)
GPIO.setup(LPWM_PIN, GPIO.OUT)
GPIO.setup(REN_PIN, GPIO.OUT)
GPIO.setup(LEN_PIN, GPIO.OUT)
# PWM Setup
frequency = 1000 # PWM frequency in Hz
rpwm = GPIO.PWM(RPWM_PIN, frequency)
lpwm = GPIO.PWM(LPWM_PIN, frequency)
# Start PWM with 0% duty cycle (off)
rpwm.start(0)
lpwm.start(0)
try:
while True:
# Enable Forward Motion
GPIO.output(REN_PIN, GPIO.HIGH)
GPIO.output(LEN_PIN, GPIO.LOW)
# Set forward speed (50% duty cycle)
rpwm.ChangeDutyCycle(50)
lpwm.ChangeDutyCycle(0)
time.sleep(2)
# Enable Reverse Motion
GPIO.output(REN_PIN, GPIO.LOW)
GPIO.output(LEN_PIN, GPIO.HIGH)
# Set reverse speed (30% duty cycle)
rpwm.ChangeDutyCycle(0)
lpwm.ChangeDutyCycle(30)
time.sleep(2)
except KeyboardInterrupt:
print("Stopping motor...")
finally:
rpwm.stop()
lpwm.stop()
GPIO.cleanup()
שלב 5: בדיקת ההתקנה שלך
- חבר את המנוע ואת ספק הכוח.
- הפעל את תסריט הפיתון:
python3 bts7960_control.py - שימו לב למהירות וכיוון שינוי המנוע כמתוכנת.
פתרון בעיות
-
המנוע לא פועל:
- בדוק חיבורי חיווט.
- אמת את ספק הכוח החיצוני.
-
PWM לא עובד:
- ודא ש- GPIO18 ו- GPIO19 מוגדרים עבור PWM.
- בדוק את ערכי מחזור החובה בסקריפט.
-
מודול התחממות יתר:
- ודא שהתיקו הנוכחי של המנוע אינו עולה על דירוג BTS7960.
יישומים של BTS7960 עם Raspberry Pi
- שליטה על מנועי DC בזרם גבוה ברובוטיקה
- בניית כלי רכב אוטומטיים או רובוטים
- יצירת מערכות ממונעות ליישומים תעשייתיים
- פיתוח מערכות מבוקרות מרחוק
מַסְקָנָה
נהג המנוע BTS7960 הוא פיתרון חזק ויעיל לנהיגה במנועים זרם גבוה. בשילוב עם יכולות ה- GPIO של Raspberry Pi, הוא פותח אפשרויות רבות לפרויקטים של רובוטיקה ואוטומציה. על ידי ביצוע מדריך זה, אתה יכול להגדיר ולשלוט ב- BTS7960 ליצירת מערכות ממונעות חזקות. התנסו בתדרי PWM שונים ומחזורי חובה כדי לייעל את הביצועים ליישום הספציפי שלכם!