

ה- AS5600 הוא חיישן מיקום מגנטי סיבובי ברזולוציה גבוהה שיכול למדוד זוויות עד 360 מעלות. עם ממשק ה- I2C שלו, קל לשלב עם פטל PI למדידות זווית מדויקות ברובוטיקה, אוטומציה ויישומים אחרים. מדריך זה מסביר כיצד להשתמש ב- AS5600 עם פטל PI לקריאת עמדות זוויתיות.
מה תצטרך
- Raspberry Pi (כל דגם עם תמיכה ב- i2c, למשל, pi 3, pi 4)
- AS5600 מודול מקודד סיבוב מגנטי
- מַגנֵט (ממוגנט מבחינה קיצונית)
- חוטי לחם וגשר
- מחשב עם גישה ל- SSH ל- Raspberry Pi או למקלדת ומחוברים
- פיתון מותקן ב- Raspberry Pi
שלב 1: הפעל את i2c ב- Raspberry Pi
- פתח את הטרמינל ב- Raspberry Pi שלך.
- הפעל את כלי התצורה של Raspberry Pi:
sudo raspi-config - נווט אל אפשרויות ממשק> i2c, ומאפשר זאת.
- אתחל מחדש את ה- Raspberry Pi:
sudo reboot
שלב 2: חיווט ה- AS5600 ל- Raspberry Pi
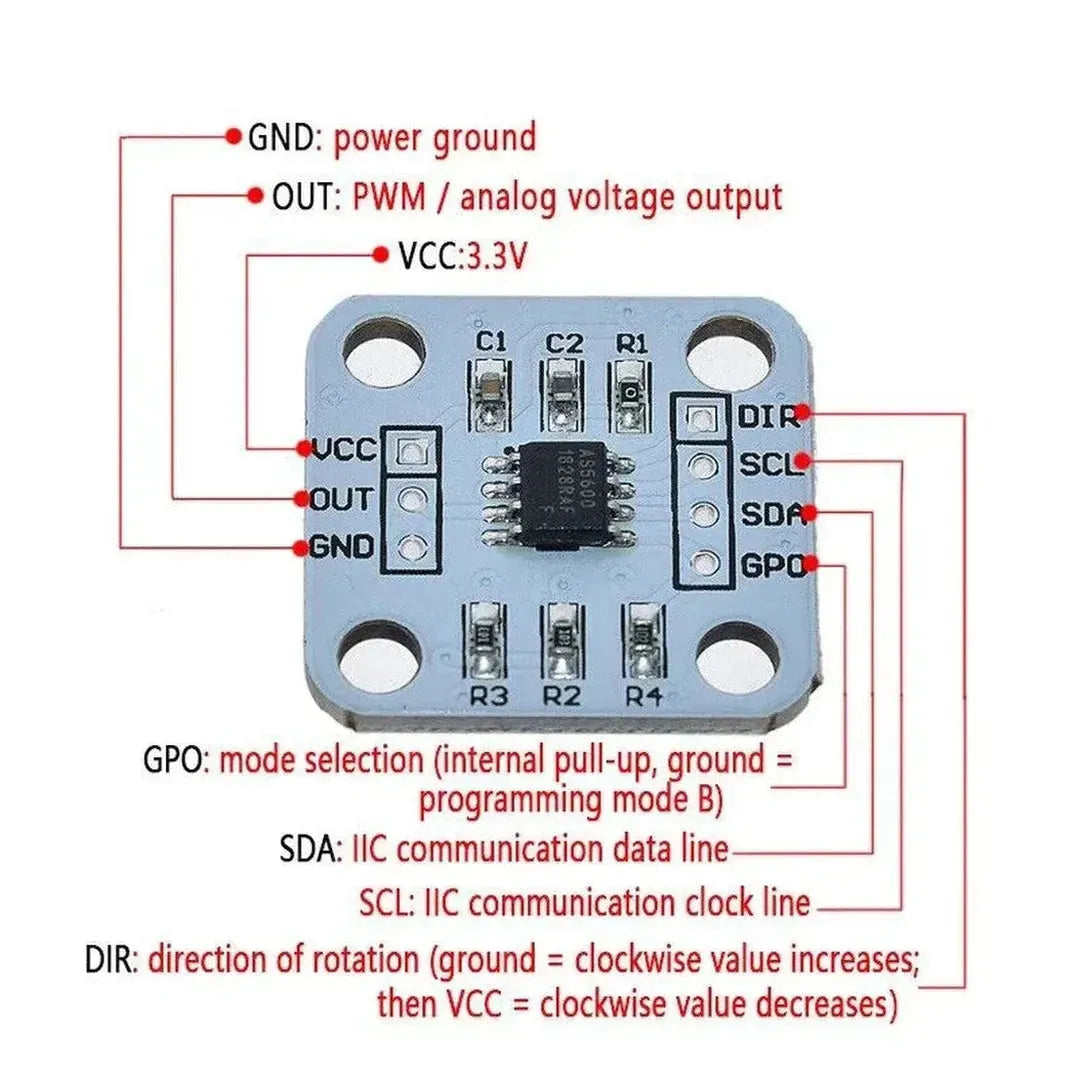
ה- AS5600 משתמש בפרוטוקול I2C לתקשורת. חבר אותו ל- Raspberry Pi כדלקמן:
| AS5600 PIN | סיכת פטל pi |
|---|---|
| VCC | 3.3 וולט (סיכה 1) |
| GND | קרקע (סיכה 6) |
| SDA | SDA (PIN 3, GPIO2) |
| SCL | SCL (סיכה 5, GPIO3) |
פֶּתֶק: וודא כי מתח ההפעלה של מודול AS5600 תואם את רמת ההיגיון 3.3 וולט של Raspberry Pi.
שלב 3: התקן כלים וספריות נדרשים
- עדכן את ה- Raspberry Pi:
sudo apt update && sudo apt upgrade -y - התקן כלי I2C:
sudo apt install -y i2c-tools - התקן ספריות פייתון לתקשורת i2c:
pip install smbus2
שלב 4: אמת חיבור I2C
- לזהות את AS5600 באוטובוס I2C:
sudo i2cdetect -y 1 - אתה אמור לראות כתובת מכשיר (למשל,
0x36) בפלט. אם לא, בדוק את החיווט שלך.
שלב 5: קרא נתונים מ- AS5600
AS5600 מספק נתוני זווית של 12 סיביות דרך i2c. אתה יכול להשתמש בסקריפט Python הבא כדי לקרוא ולהציג את המיקום הזוויתי.
דוגמה לקוד פיתון
import smbus2
import time
# Define I2C address and bus
AS5600_ADDR = 0x36
ANGLE_REG = 0x0E
bus = smbus2.SMBus(1)
def read_angle():
# Read two bytes from the angle register
raw_data = bus.read_i2c_block_data(AS5600_ADDR, ANGLE_REG, 2)
angle = (raw_data[0] << 8) | raw_data[1] # Combine MSB and LSB
angle = angle & 0x0FFF # Mask to 12 bits
return (angle / 4096.0) * 360.0 # Convert to degrees
try:
while True:
angle = read_angle()
print(f"Angle: {angle:.2f} degrees")
time.sleep(0.5)
except KeyboardInterrupt:
print("Exiting...")
שלב 6: יישומי AS5600
ה- AS5600 רב תכליתי וניתן להשתמש בו בפרויקטים שונים:
- רובוטיקה: מדוד זוויות מפרקים או גלגלים לשליטה מדויקת.
- מקודדים: צור מקודדי סיבוב DIY למכונות CNC או מדפסות תלת מימד.
- בקרות ידית: השתמש ככפתור ברזולוציה גבוהה לניווט נפח או תפריט.
- מעקב אחר מיקום: עקוב אחר עמדות זוויתיות במערכות אוטומציה.
פתרון בעיות
-
המכשיר לא זוהה:
- אמת חיבורי SDA ו- SCL.
- ודא ש- i2c מופעל ב- Raspberry Pi.
- בדוק את מתח ההפעלה של AS5600.
-
קריאות לא מדויקות:
- ודא שהמגנט מיושר נכון עם חיישן AS5600.
- השתמש במגנט מגנטית קיצונית למדידות מדויקות.
-
שגיאות i2c:
- בדוק אם יש מכשירים סותרים באוטובוס i2c באמצעות
i2cdetect. - ודא שהכתובת של AS5600 תואמת את התסריט.
- בדוק אם יש מכשירים סותרים באוטובוס i2c באמצעות
מַסְקָנָה
חיישן מיקום הסיבוב המגנטי AS5600 הוא כלי חזק וקל לשימוש למדידת זוויות. על ידי ביצוע מדריך זה, תוכלו לשלב את AS5600 עם Raspberry Pi ליצירת מערכות מדידה סיבוביות מדויקות לרובוטיקה, אוטומציה ועוד. התנסו ביישומים שונים כדי לפתוח את מלוא הפוטנציאל של חיישן רב -תכליתי זה!



































































































































