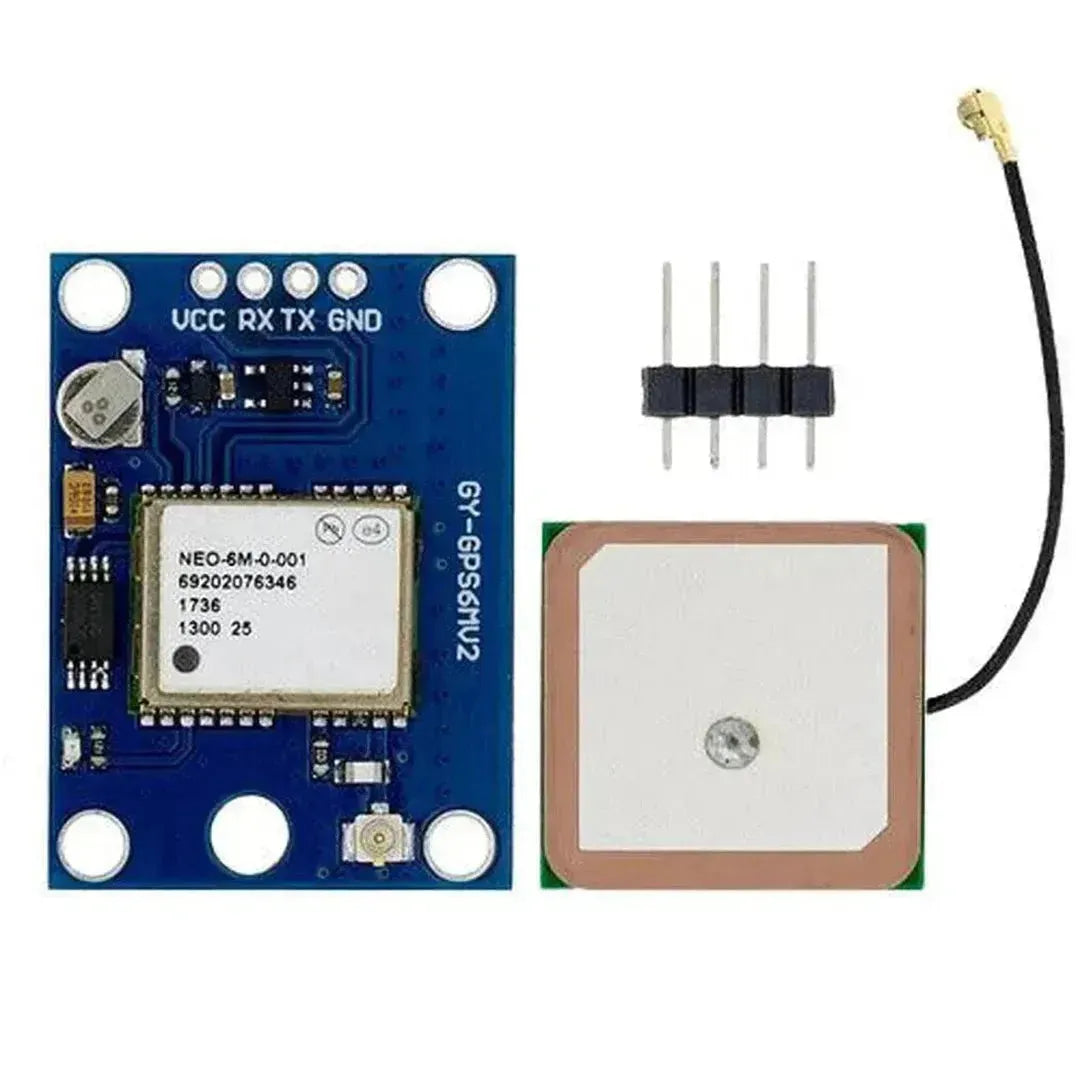


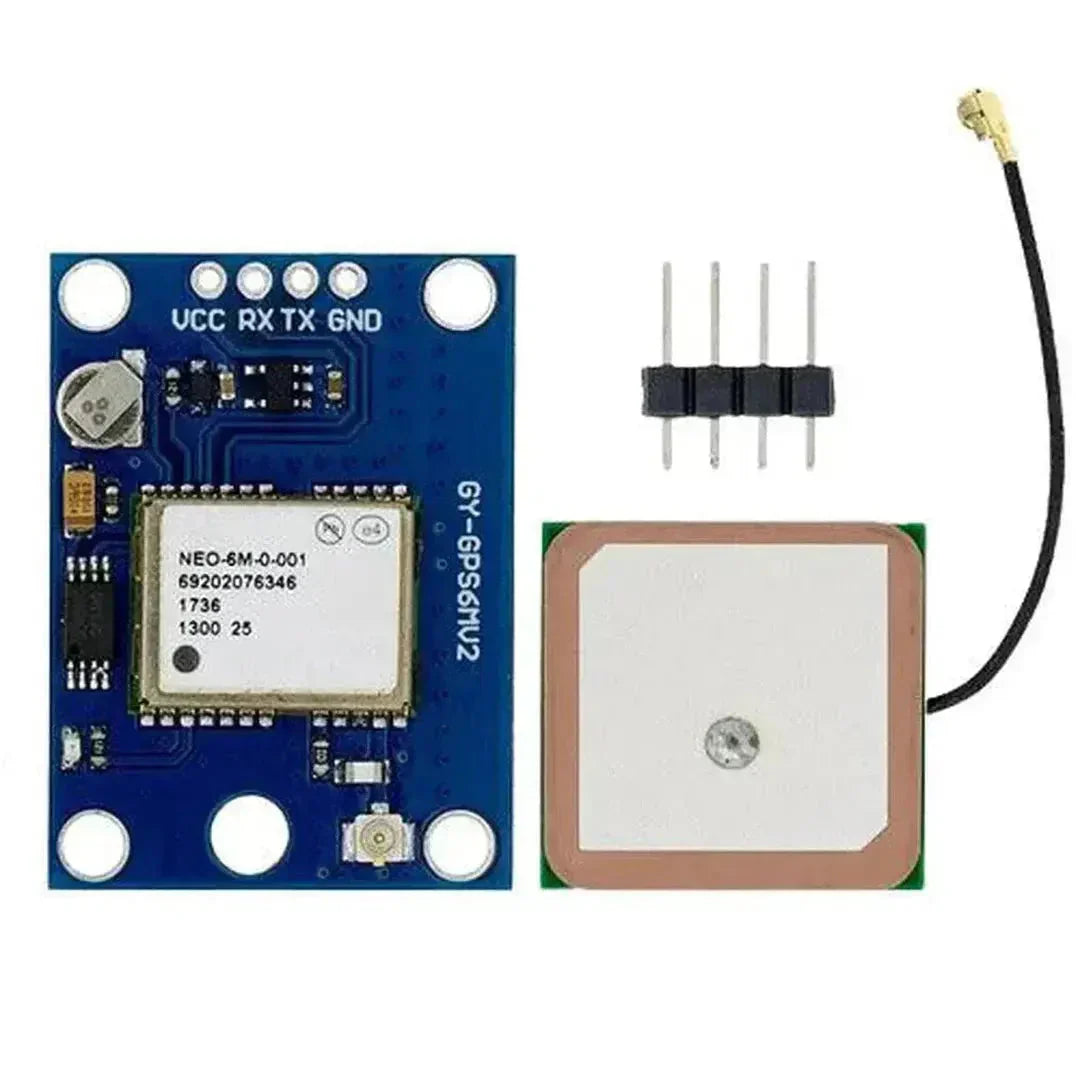
מודול ה- GPS של Neo-6M הוא בחירה פופולרית להוספת פונקציונליות GPS לפרויקטים של Raspberry Pi. הוא מספק נתוני מיקום, גובה ותזמון מדויקים, מה שהופך אותו לאידיאלי ליישומי ניווט, מיקום גיאוגרפי וסנכרון זמן. מדריך זה יעביר אתכם בהגדרת והשתמש במודול ה- GPS של Neo-6M עם Pi פטל.
מה תצטרך
- Raspberry Pi (כל דגם עם תמיכה ב- GPIO, למשל, pi 3, pi 4)
- מודול GPS של Neo-6M
- חוטי לחם וגשר
- מחשב עם גישה ל- SSH ל- Raspberry Pi או למקלדת ומחוברים
- פיתון מותקן ב- Raspberry Pi
שלב 1: חיווט הניאו -6 מ 'לפטל PI
ה- NEO-6M מתקשר עם ה- Raspberry Pi באמצעות הממשק UART (סדרתי).
חיבורים
| PIN NEO-6M | סיכת פטל pi |
|---|---|
| VCC | 3.3 וולט (סיכה 1) |
| GND | קרקע (סיכה 6) |
| TXD | RXD (סיכה 10, GPIO15) |
| RXD | TXD (סיכה 8, GPIO14) |
פֶּתֶק: ודא שה- NEO-6M מופעל עם 3.3V או 5V כפי שצוין על ידי המודול שלך. בדוק את גיליון הנתונים של המודול.
שלב 2: הפעל את ה- UART ב- Raspberry Pi
- פתח את כלי התצורה של Raspberry Pi:
sudo raspi-config - נווט אל אפשרויות ממשק> יציאה סדרתית:
- בחר "לא" כשנשאל אם אתה רוצה מעטפת כניסה מעל הממשק הסדרתי.
- בחר "כן" כדי לאפשר את חומרת היציאה הסדרתית.
- אתחל מחדש את ה- Raspberry Pi:
sudo reboot
שלב 3: התקן כלים וספריות נדרשים
- עדכן את ה- Raspberry Pi שלך:
sudo apt update && sudo apt upgrade -y - לְהַתְקִין
minicomלבדיקת מודול ה- GPS:sudo apt install -y minicom - התקן ספריות פייתון לתקשורת סדרתית וניתוח GPS:
pip install pyserial pynmea2
שלב 4: בדוק את מודול ה- GPS
- לִפְתוֹחַ
minicomכדי לבדוק אם מודול ה- GPS שולח נתונים:sudo minicom -b 9600 -o -D /dev/serial0 - אתה אמור לראות נתוני GPS בפורמט NMEA (למשל,
$GPGGA,$GPRMC). אִם לֹא:- בדוק את החיווט שלך.
- ודא שלמודול יש מבט ברור של השמיים לרכוש אותות לוויין.
- יְצִיאָה
minicomבלחיצהCtrl+AואזZובחירהX.
שלב 5: קרא נתוני GPS באמצעות Python
סקריפט Python הבא קורא ומנתח נתוני GPS ממודול Neo-6M.
דוגמה לקוד פיתון
import serial
import pynmea2
def read_gps():
# Open serial connection to GPS module
gps_serial = serial.Serial("/dev/serial0", baudrate=9600, timeout=1)
while True:
try:
line = gps_serial.readline().decode("ascii", errors="replace")
if line.startswith("$GPGGA"):
msg = pynmea2.parse(line)
print(f"Latitude: {msg.latitude}, Longitude: {msg.longitude}")
print(f"Altitude: {msg.altitude} {msg.altitude_units}")
except pynmea2.ParseError as e:
print(f"Parse error: {e}")
except KeyboardInterrupt:
print("Exiting...")
break
if __name__ == "__main__":
read_gps()
שלב 6: יישומים של מודול ה- GPS Neo-6M
- מערכות ניווט: צור עוקבי GPS לרכבים או מל"טים.
- Geotaging: הקלט נתוני מיקום לתמונות או לאירועים אחרים.
- סנכרון זמן: השתמש בנתוני GPS לקבלת זמן מדויק מאוד.
- מכשירי IoT: אפשר אוטומציה מבוססת מיקום.
פתרון בעיות
-
אין נתוני GPS במיניקום:
- בדוק את החיווט (חיבורי TXD ו- RXD).
- ודא שמודול ה- GPS מופעל כראוי.
- מקם את המודול בשטח פתוח לקבלת קבלת פנים לוויין טובה יותר.
-
תסריט פייתון לא עובד:
- ודא ש-
serial0הממשק מופעל ונגיש. - להבטיח את ספריות הפיתון (
pyserial,pynmea2) מותקנים.
- ודא ש-
-
רכישת לוויין איטית:
- אפשר לזמן מודול ה- GPS לרכוש אותות, במיוחד בשימוש ראשון.
- השתמש באנטנה חיצונית במידת הצורך.
מַסְקָנָה
מודול ה- GPS של Neo-6M הוא כלי רב-תכליתי ומדויק להוספת פונקציונליות מיקום גיאוגרפי לפרויקטים של Raspberry Pi שלך. על ידי ביצוע מדריך זה, תוכלו להגדיר את מודול ה- GPS ולהתחיל ללכוד נתוני מיקום עבור מגוון יישומים. התנסו בשילוב מודול ה- GPS בפרויקטים של ניווט, מעקב או IoT כדי להשתמש במלואם ביכולותיו!



































































































































