





MCP2515 הוא מודול האוטובוס של CAN (רשת בקר) בשימוש נרחב לתקשורת רכב ותעשייה. זה מאפשר לארדואינו להתממשק למערכות מבוססות CAN לשלוח ולקבל נתונים ביעילות. מדריך זה ינחה אתכם באמצעות הגדרת ושימוש במודול MCP2515 עם Arduino.
מה תצטרך
- MCP2515 CAN מודול אוטובוס
- לוח ארדואינו (למשל, אונו, מגה, ננו)
- מכשיר תואם של CAN-BUS או מודול MCP2515 אחר
- חוטי מגשר
- לחם (אופציונלי)
- מחשב עם Arduino IDE המותקן
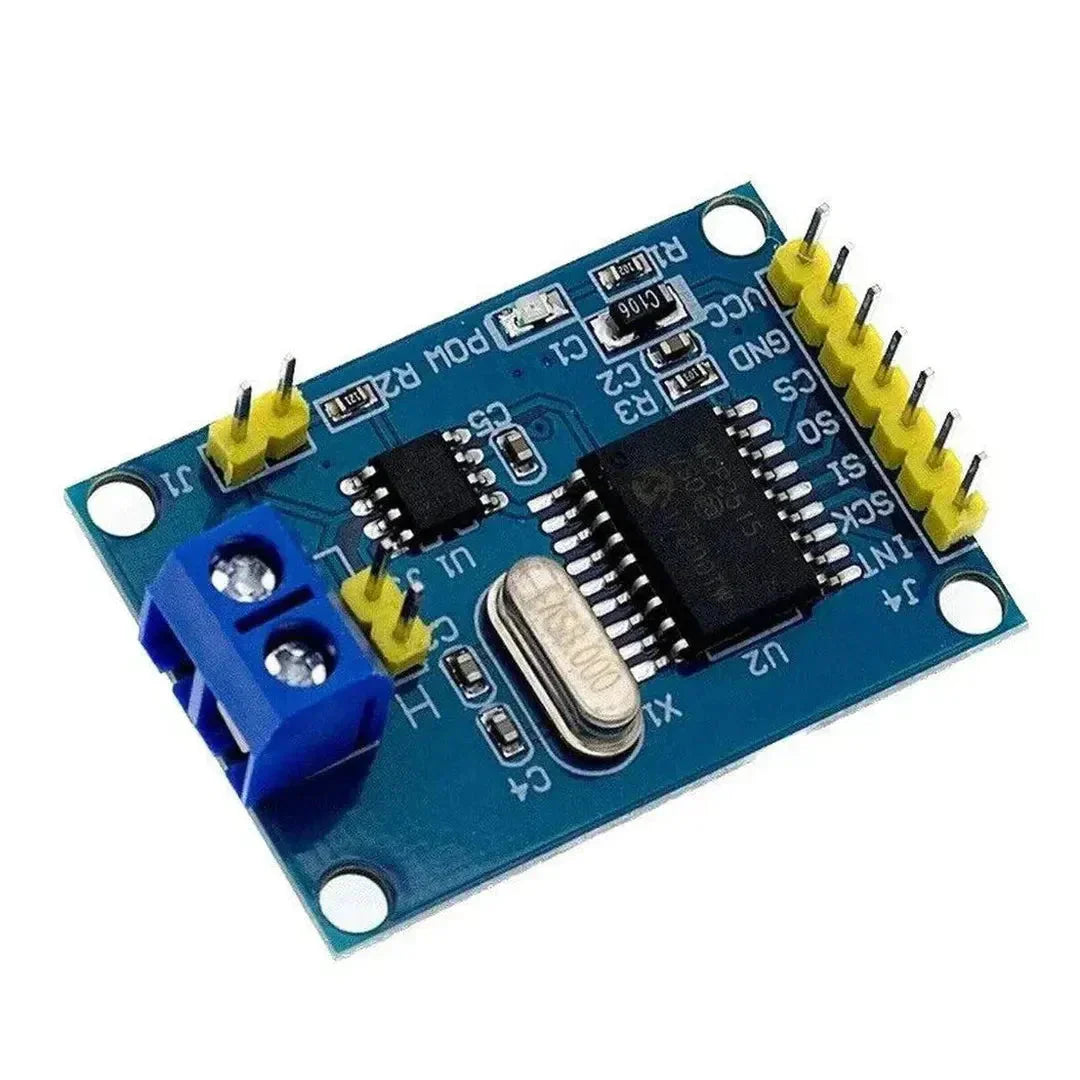
שלב 1: הבנת מודול MCP2515
מודול MCP2515 משתמש ב- MCP2515 CAN Controller IC ו- TJA1050 CAN משדר. המודול מתקשר עם הארדואינו דרך ממשק ה- SPI.
MCP2515 PINOUT
| פִּין | פוּנקצִיָה |
|---|---|
| VCC | ספק כוח (5V) |
| GND | טָחוּן |
| CS | שבב בחר |
| כָּך | פלט נתוני SPI |
| סִי | קלט נתוני SPI |
| SCK | שעון SPI |
| Int | הפסק פלט |
שלב 2: חיווט ה- MCP2515 לארדואינו
להלן מדריך החיווט לחיבור מודול MCP2515 ל- Arduino UNO:
| PIN MCP2515 | סיכת ארדואינו |
|---|---|
| VCC | 5V |
| GND | GND |
| CS | סיכה 10 |
| כָּך | סיכה 12 |
| סִי | סיכה 11 |
| SCK | סיכה 13 |
| Int | סיכה 2 |
פֶּתֶק: עבור לוחות ארדואינו אחרים, וודאו כי סיכות ה- SPI תואמות את הפינאוט של הלוח הספציפי שלכם.
שלב 3: התקן את הספרייה הנדרשת
THE MCP_CAN הספרייה מפשטת אינטראקציה עם מודול MCP2515.
שלבים להתקנת ספריית MCP_CAN:
- פתח את IDE Arduino.
- לך אל סְקִיצָה > כלול ספרייה > לנהל ספריות.
- חפש את "MCP_CAN" במנהל הספרייה.
- נְקִישָׁה לְהַתְקִין.
שלב 4: העלה את הקוד
קוד משדר (שליחת נתונים באוטובוס CAN):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
if (CAN.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully");
} else {
Serial.println("Error Sending Message");
}
delay(1000); // Send data every second
}
קוד מקלט (קריאת נתונים מאוטובוס CAN):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char len = 0;
unsigned char buf[8];
if (CAN.checkReceive() == CAN_MSGAVAIL) {
CAN.readMsgBuf(&len, buf);
unsigned long id = CAN.getCanId();
Serial.print("Message ID: 0x");
Serial.println(id, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
שלב 5: בדוק את ההתקנה
- חבר את מודול MCP2515 לארדואינו שלך כמתואר בשלב 2.
- Upload the transmitter code to one Arduino and the receiver code to another Arduino.
- Connect the CAN_H and CAN_L pins of both MCP2515 modules to establish the CAN bus.
- פתח את המוניטור הסדרתי בשני הארדוינוס וקבע את שיעור הבוד
115200. - על המקלט ארדואינו, אתה אמור לראות את ההודעות שנשלחו על ידי המשדר ארדואינו.
פתרון בעיות
- לא התקבלו נתונים: בדוק את חיבורי CAN_H ו- CAN_L בין המודולים.
- האתחול נכשל: ודא שחיבורי ה- SPI ו- CS PIN תואמים את ההגדרה שלך.
- תקשורת לא תקינה: ודא ששני המודולים משתמשים באותו קצב baud (500 kbps בדוגמה זו).
יישומים של מודול האוטובוס של MCP2515
- אבחון רכב (OBD-II)
- מערכות אוטומציה תעשייתיות
- תקשורת רובוטיקה
- מכשירי IoT עם רשתות CAN
מַסְקָנָה
הגדרת בהצלחה את מודול האוטובוס של MCP2515 עם Arduino לצורך שליחה וקבלת נתונים. This module is incredibly versatile for applications requiring reliable communication over a CAN bus. התנסו במזהי הודעות שונים ועומסי נתונים כדי לחקור את מלוא הפוטנציאל שלה!



































































































































