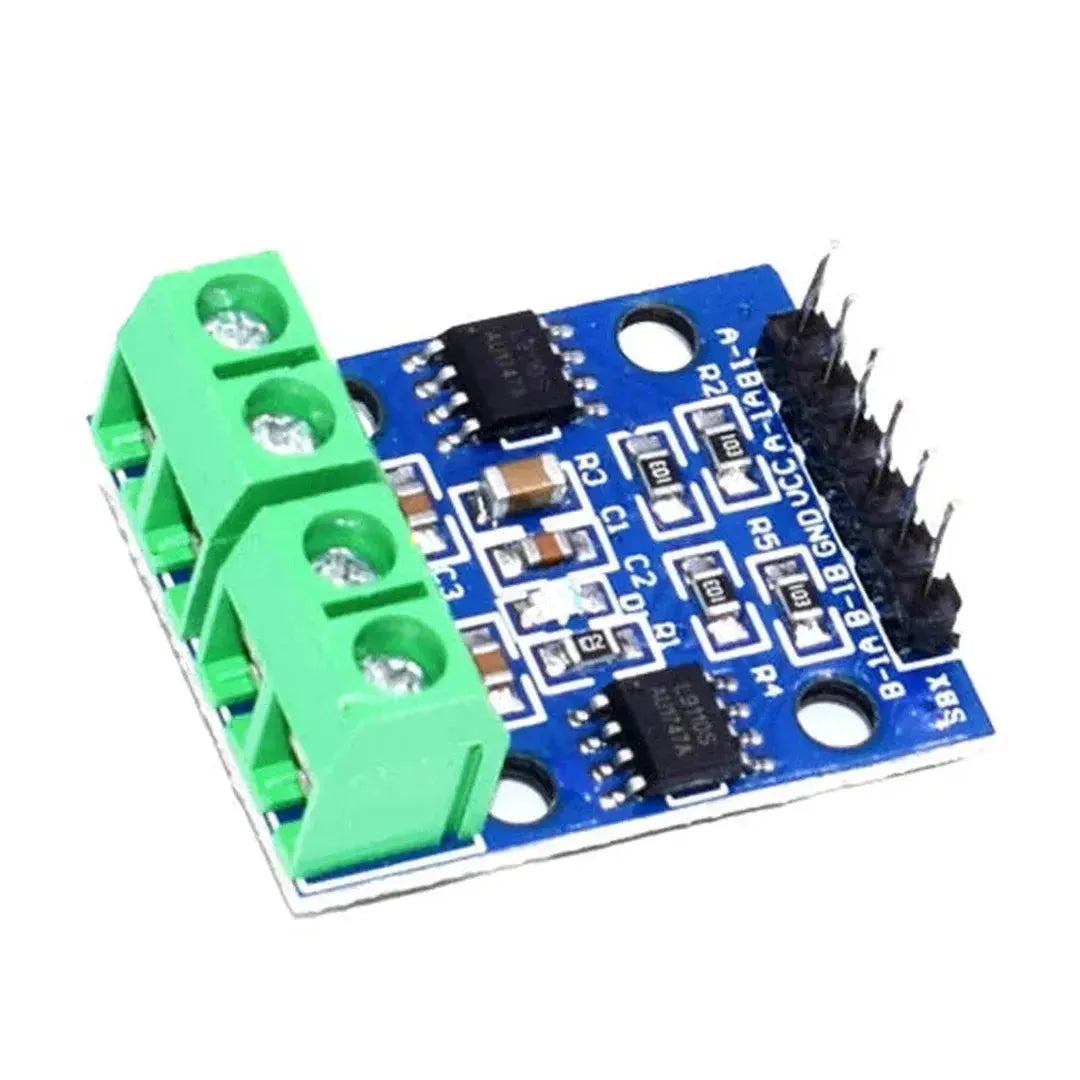
נהג המנוע L9110S הוא פיתרון קומפקטי ויעיל לבקרת מנועי DC ומנועי צעד בפרויקטים של ארדואינו. בין אם אתם בונים רובוט פשוט או מערכת אוטומציה מורכבת יותר, L9110S מציע דרך אמינה לנהל פעולות מוטוריות במינימום חיווט ותכנות מורכבות. בפוסט בבלוג זה, נחקור את התכונות של מנהל ההתקן L9110S, כיצד לחבר אותו לארדואינו, ונספק קוד לדוגמא כדי להתחיל.
מהו L9110S?
ה- L9110S הוא נהג מנוע כפול-ערוץ IC שנועד לשלוט על המהירות והכיוון של שני מנועי DC או מנוע צעד אחד. הוא פועל על טווח מתח של 2.5 וולט עד 12 וולט, מה שהופך אותו למגוון ליישומים שונים. ה- L9110S ידוע בגודלו הקומפקטי, צריכת החשמל הנמוכה וקלות השילוב עם מיקרו -בקרים כמו ארדואינו.
מדוע לבחור ב- L9110S?
- עיצוב קומפקטי: טביעת הרגל הקטנה שלה הופכת אותה לאידיאלית לפרויקטים עם שטח מוגבל.
- ערוצים כפולים: שלוט בשני מנועים באופן עצמאי, ומאפשר תנועות מורכבות.
- קל לשימוש: ממשק פשוט עם תיוג ברור לחיבורים קלים.
- חסכוני: תמחור סביר מבלי להתפשר על הפונקציונליות.
חיבור ה- L9110S לארדואינו
הגדרת ה- L9110S עם ארדואינו היא פשוטה. להלן מדריך שלב אחר שלב לייצור החיבורים:
-
חיבורי חשמל:
- חבר את
VCCסיכה של ה- L9110S לסיכה 5V על הארדואינו. - חבר את
GNDסיכה של ה- L9110S לסיכת ה- GND על הארדואינו.
- חבר את
-
חיבורי מנוע:
- חבר את המנוע הראשון ל
OUT1וכןOUT2סיכות. - אם משתמשים במנוע שני, חבר אותו ל-
OUT3וכןOUT4סיכות.
- חבר את המנוע הראשון ל
-
סיכות בקרה:
- חבר את
AIN1וכןAIN2סיכות לשני סיכות דיגיטליות בארדואינו (למשל, סיכות 2 ו -3). - אם משתמשים במנוע שני, התחבר
BIN1וכןBIN2לשני סיכות דיגיטליות אחרות (למשל, סיכות 4 ו -5).
- חבר את
עיין בתרשים למטה לייצוג חזותי של החיבורים:

תכנת הארדואינו
לאחר הגדרת החומרה, השלב הבא הוא לתכנת את הארדואינו כדי לשלוט במנועים. להלן קוד דוגמה המדגים כיצד לשלוט על הכיוון והמהירות של מנוע DC באמצעות מנהל ההתקן L9110S.
// Define motor control pins
const int AIN1 = 2;
const int AIN2 = 3;
// Setup function
void setup() {
// Initialize the motor control pins as outputs
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
}
// Loop function
void loop() {
// Rotate motor forward
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
// Rotate motor backward
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
}
הֶסבֵּר:
-
AIN1וכןAIN2משמשים לשליטה בכיוון המנוע. - סְבִיבָה
AIN1גבוה וAIN2נמוך מסובב את המנוע קדימה. - סְבִיבָה
AIN1נמוך וAIN2גבוה מסתובב את המנוע לאחור. - קביעת שניהם
AIN1וכןAIN2נמוך עוצר את המנוע.
שליטה במהירות עם PWM
ה- L9110S תומך ב- PWM (אפנון רוחב הדופק) לבקרת מהירות. על ידי שינוי מחזור התפקיד של אות PWM, אתה יכול להתאים את מהירות המנוע. הנה כיצד לשנות את הקוד הקודם כך שיכלול בקרת מהירות:
// Define motor control pins
const int AIN1 = 2;
const int AIN2 = 3;
const int PWM_PIN = 9; // PWM pin for speed control
// Setup function
void setup() {
// Initialize the motor control pins as outputs
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(PWM_PIN, OUTPUT);
}
// Loop function
void loop() {
// Set speed to 150 out of 255
analogWrite(PWM_PIN, 150);
// Rotate motor forward
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
// Rotate motor backward
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
}
הֶסבֵּר: THE analogWrite() הפונקציה שולחת אות PWM למנוע, ומאפשר לך לשלוט במהירות שלו. הערך נע בין 0 (עצירה) ל 255 (מהירות מלאה).
יישומים של L9110S עם ארדואינו
השילוב של נהג המנוע של L9110S ו- Arduino פותח מגוון רחב של אפשרויות פרויקט:
- רובוטיקה: שלוט בתנועת זרועות רובוטיות או רובוטים ניידים עם שליטה מוטורית מדויקת.
- מערכות אוטומציה: אוטומציה של משימות כמו דלתות פתיחה/סגירה, התאמת שסתומים או רכיבים העברתם בקווי הרכבה.
- פרויקטים של DIY: צור פרויקטים אלקטרוניים בהתאמה אישית כמו מחווני מצלמה ממונעים, מערכות השקיה צמחיות אוטומטיות או כלי רכב בשליטה מרחוק.
- כלים חינוכיים: למד את התלמידים על שליטה מוטורית, אלקטרוניקה ותכנות באמצעות פרויקטים מעשיים.
מַסְקָנָה
מנהל ההתקן L9110S הוא רכיב רב-תכליתי וידידותי למשתמש עבור כל מי שמחפש לשלוט במנועים באמצעות ארדואינו. יכולת הערוץ הכפול שלה, בשילוב עם פשטות בחיווט ותכנות, הופכת אותו לבחירה מצוינת הן עבור מתחילים והן עבור חובבים מנוסים. על ידי ביצוע הצעדים המפורטים בפוסט זה, אתה יכול לשלב במהירות שליטה מוטורית בפרויקטים שלך ולהרחיב את הפונקציונליות של המערכות מבוססות Arduino שלך.
התנסו במהירויות מנוע, כיוונים ויישומים שונים לרתום באופן מלא את הפוטנציאל של נהג המנוע L9110S. מתעסק שמח!