





בתחום היישומים לרכב ותעשייה, תקשורת אמינה בין ריבוי בקרי מיקרו היא בעלת חשיבות עליונה. פרוטוקול האוטובוס של רשת האזור (CAN) התגלה כפתרון חזק לצרכים כאלה. פוסט בבלוג זה מתעמק ביסודות פרוטוקול האוטובוס CAN ומדגים כיצד לשלב את בקר MCP2515 עם ארדואינו, ומאפשר תקשורת חלקה בפרויקטים שלך.
מהו פרוטוקול האוטובוס?
אוטובוס רשת אזור הבקר (CAN) הוא אוטובוס רכב חזק שתוכנן לאפשר למיקרו -בקרים ומכשירים לתקשר זה עם זה ללא מחשב מארח. פותח על ידי בוש בשנות השמונים, CAN BUS הפך לסטנדרט במערכות רכב אך נמצא בשימוש נרחב גם באוטומציה תעשייתית ובמערכות משובצות אחרות.
תכונות המפתח של פרוטוקול האוטובוס CAN כוללות:
- תצורה רב-מאסטר: צמתים מרובים יכולים לתקשר באותו אוטובוס ללא בקר מרכזי.
- עדיפות הודעה: עדיפות להודעות על סמך המזהה שלהן, ומבטיחים שנתונים קריטיים מועברים תחילה.
- איתור שגיאות: מנגנוני איתור שגיאות חזקים, כולל בדיקות CRC וקטעי אישור, משפרים את האמינות.
- תקשורת במהירות גבוהה: תומך בשיעורי נתונים של עד 1 מגהביט לשנייה, המתאים ליישומים בזמן אמת.
תכונות אלה הופכות את האוטובוס לאידיאלי לתרחישים שבהם מכשירים מרובים צריכים לתקשר ביעילות ובאמינות, כמו למשל במערכות ניהול מנועי רכב, אוטומציה תעשייתית ורובוטיקה.
הצגת בקר MCP2515
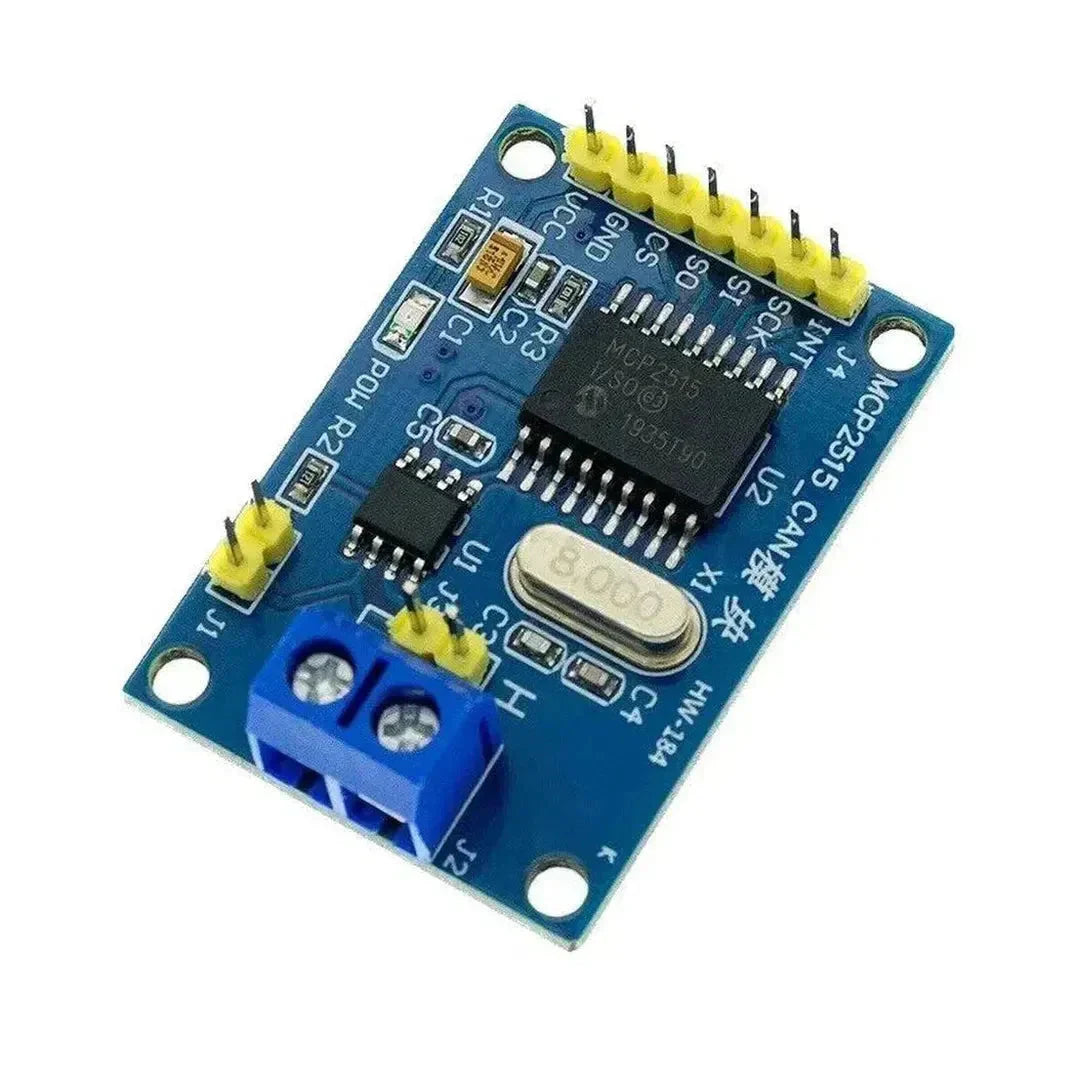
ה- MCP2515 הוא בקר רשת בקרה עצמאית (CAN) מבקר המתממשק למיקרו-בקרים דרך הממשק ההיקפי הסדרתי (SPI). הוא מטפל בפרוטוקול ה- CAN המורכב, ומאפשר למפתחים להתמקד בהיגיון יישומים ברמה גבוהה יותר. תכונות המפתח של ה- MCP2515 כוללות:
- תמיכה במסגרות יכולות רגילות ומורחבות.
- מנגנוני טיפול וסינון מובנים שגיאות.
- תאימות עם בקרי מיקרו שונים, כולל ארדואינו.
- צריכת חשמל נמוכה, מה שהופך אותה מתאימה למערכות משובצות.
על ידי שילוב ה- MCP2515 עם Arduino, אתה יכול להוסיף יכולות אוטובוס של CAN לפרויקטים שלך, ולאפשר תקשורת עם מכשירים או רשתות אחרות המאפשרות CAN.
הגדרת ה- MCP2515 עם ארדואינו
כדי להתחיל, תזדקק לרכיבים הבאים:
- מועצת Arduino (למשל, Arduino uno)
- MCP2515 CAN מודול (לעתים קרובות מגיע עם TJA1050 CAN משדר)
- חוטי מגשר
- לחם (אופציונלי)
להלן מדריך שלב אחר שלב להגדרת ה- MCP2515 עם ארדואינו שלך:
1. חיווט ה- MCP2515 לארדואינו
חבר את מודול MCP2515 לארדואינו כדלקמן:
- VCC אֶל 5V על ארדואינו
- GND אֶל GND על ארדואינו
- CS אֶל סיכה 10 על ארדואינו
- SCK אֶל סיכה 13 על ארדואינו
- סִי (Mosi) to סיכה 11 על ארדואינו
- כָּך (מיסו) ל סיכה 12 על ארדואינו
- Int אֶל סיכה 2 על ארדואינו
Arduino MCP2515
------- -------
5V ------> VCC
GND ------> GND
Pin 10 ------> CS
Pin 13 ------> SCK
Pin 11 ------> SI (MOSI)
Pin 12 ------> SO (MISO)
Pin 2 ------> INT
2. התקנת הספריות הנדרשות
כדי לתקשר עם ה- MCP2515, תזדקק ל MCP_CAN סִפְרִיָה. התקן אותו דרך מנהל הספרייה של Arduino:
- פתח את IDE Arduino.
- נווט אל סקיצה> כלול ספרייה> ניהול ספריות ...
- חפש MCP_CAN ולהתקין את MCP_CAN ספרייה מאת קורי ג'יי פאולר.
3. העלאת קוד הדוגמה
להלן דוגמה בסיסית לשלוח ולקבל הודעות CAN באמצעות MCP2515 ו- Arduino:
שליחת הודעת פחית
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
byte data[] = {0x00, 0xFF, 0xAA, 0x55, 0x33, 0x66, 0x99, 0xCC};
// Send data: CAN ID = 0x100, data length = 8
if (CAN0.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully!");
} else {
Serial.println("Error Sending Message...");
}
delay(1000);
}
קבלת הודעת פחית
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
unsigned long canId;
byte len = 0;
byte buf[8];
// Check if data has been received
if (CAN0.checkReceive() == CAN_MSGAVAIL) {
CAN0.readMsgBuf(&canId, &len, buf);
Serial.print("CAN ID: 0x");
Serial.println(canId, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
במערכון השולח, Arduino מעביר הודעת CAN עם ID 0x100 כל שנייה. הסקיצה המקבלת מקשיבה להודעות CAN נכנסות ומדפיסות את המזהה והנתונים לצג הסידורי.
יישומים של אוטובוס פחית עם ארדואינו
שילוב CAN CAN עם Arduino פותח ריבוי יישומים מעבר למערכות רכב. כמה מקרי שימוש פופולריים כוללים:
- רובוטיקה: אפשר תקשורת בין בקרי מנוע לחיישנים מרובים.
- אוטומציה תעשייתית: להקל על חילופי נתונים בין מכונות שונות ויחידות בקרה.
- אוטומציה ביתית: חבר מכשירים חכמים שונים ברשת מאוחדת.
- מערכות רכישת נתונים: איסוף ועבד נתונים מחיישנים מרובים ביעילות.
מַסְקָנָה
פרוטוקול האוטובוס CAN, עם אמינותו ויעילותו, משמש כעמוד שדרה לתקשורת במספר מערכות משובצות. על ידי ניצול ה- MCP2515 CANCER CONTROCTION עם ארדואינו, מפתחים יכולים לשלב ללא מאמץ יכולות אוטובוס יכולות בפרויקטים שלהם. בין אם אתם עובדים על מערכות רכב, אוטומציה תעשייתית או רובוטיקה מורכבת, הבנה ומינוף יכולים אוטובוס יכול לשפר משמעותית את מסגרת התקשורת של המערכת שלכם.
עם המדריכים והדוגמאות המקיפים המסופקים, אתה מצויד היטב לצאת לשילוב של Can Can בפרויקט Arduino הבא שלך. קידוד שמח!

















































































































































