




מנוע צעד 28byj-48 הוא מנוע צעד פופולרי ובמחיר סביר המשמש לעתים קרובות בפרויקטים של אלקטרוניקה DIY. בשילוב עם לוח הנהג ULN2003, זו בחירה מצוינת ליישומים הדורשים תנועה מדויקת, כמו רובוטיקה, מחווני מצלמה ואוטומציה ביתית. מדריך זה ינחה אתכם באמצעות הגדרת ושליטה על מנוע צעד 28byj-48 עם Arduino.
מה תצטרך
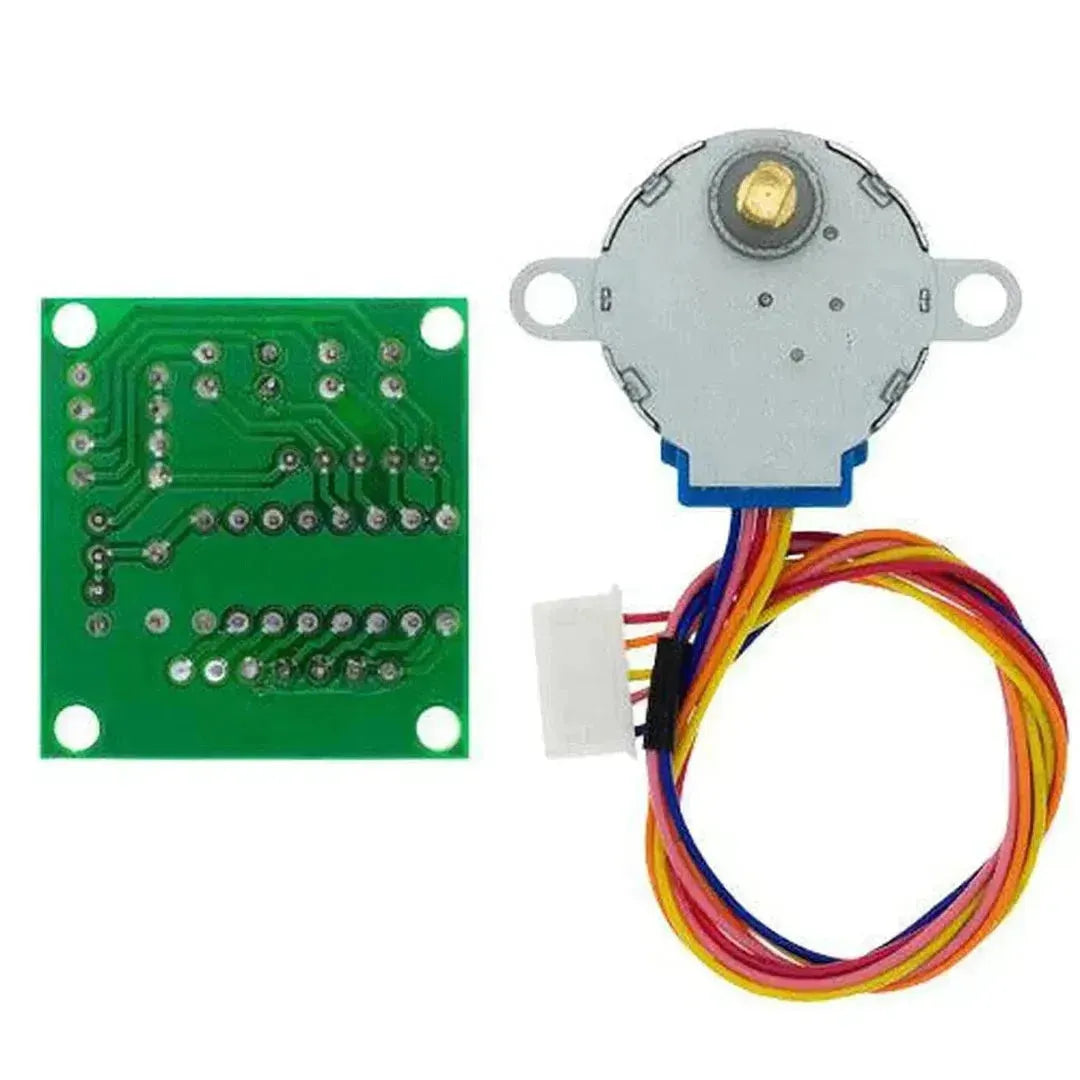
- 28byj-48 מנוע צעד
- לוח הנהג ULN2003
- לוח ארדואינו (למשל, אונו, מגה, ננו)
- חוטי מגשר
- לחם (אופציונלי)
- מחשב עם Arduino IDE המותקן
שלב 1: הבנת הרכיבים
28byj-48 מנוע צעד
- ה- 28byj-48 הוא מנוע צעד 4 חוטים עם 5 חוטים עם יחס הפחתת הילוכים של 1:64 בערך, מה שהופך אותו לדייק ואמין.
לוח הנהג ULN2003
- The ULN2003 is a driver board designed specifically for the 28BYJ-48 motor. It includes LEDs to indicate the motor’s active phase and simplifies connections to the Arduino.
שלב 2: חיווט ה- ULN2003 לארדואינו
-
חבר את המנוע 28byj-48 ללוח הנהג ULN2003. מחבר המנוע משתלב ישירות לכותרת שכותרתה "בתוך" על הלוח.
-
השתמש בחוטי מגשר כדי לחבר את לוח הנהג ULN2003 לארדואינו כדלקמן:
| ULN2003 PIN | סיכת ארדואינו |
|---|---|
| In1 | סיכה 8 |
| In2 | סיכה 9 |
| IN3 | סיכה 10 |
| IN4 | סיכה 11 |
| VCC | 5V |
| GND | GND |
שלב 3: התקן את ספריית צעד
IDE Arduino כולל ספרייה מובנית לבקרת מנוע צעד.
- פתח את IDE Arduino.
- לך אל סְקִיצָה > כלול ספרייה > צעד.
שלב 4: העלה את הקוד
להלן קוד דוגמה בסיסי לשליטה על מנוע הצעד:
#include <Stepper.h>
// Define the number of steps per revolution for the 28BYJ-48 motor
#define STEPS_PER_REV 2048
// Initialize the Stepper library on pins 8, 9, 10, and 11
Stepper stepper(STEPS_PER_REV, 8, 10, 9, 11);
void setup() {
stepper.setSpeed(15); // Set motor speed (in RPM)
Serial.begin(9600);
Serial.println("28BYJ-48 Stepper Motor Test");
}
void loop() {
Serial.println("Moving Forward");
stepper.step(STEPS_PER_REV); // Move one full revolution forward
delay(1000);
Serial.println("Moving Backward");
stepper.step(-STEPS_PER_REV); // Move one full revolution backward
delay(1000);
}
שלב 5: בדוק את ההתקנה
- חבר את Arduino למחשב שלך באמצעות USB.
- פתח את ה- Arduino IDE ובחר את הנכון לוּחַ וכן נָמָל מתחת ל כְּלֵי עֲבוֹדָה תַפרִיט.
- העלה את הקוד לארדואינו על ידי לחיצה העלה.
- לאחר העלאת הקוד, על מנוע הצעד לסובב מהפכה מלאה אחת קדימה ואז לאחור שוב ושוב.
בקרה מתקדמת עם תאוצה
לבקרה חלקה ומדויקת יותר, אתה יכול להשתמש ב Accelstepper ספרייה במקום ספריית צעד מובנית. הנה דוגמא:
#include <AccelStepper.h>
// Define the motor interface type
#define HALFSTEP 8
// Initialize the AccelStepper library
AccelStepper stepper(HALFSTEP, 8, 10, 9, 11);
void setup() {
stepper.setMaxSpeed(1000); // Set maximum speed
stepper.setAcceleration(500); // Set acceleration
stepper.setSpeed(200); // Set initial speed
}
void loop() {
stepper.runSpeed(); // Continuous rotation
}
פתרון בעיות
- המנוע לא זז: בדוק את כל החיבורים וודא שהסיכות הנכונות מוגדרות בקוד.
- תנועה לא תקינה: ודא כי אספקת החשמל של המנוע מספיקה והקוד תואם את ההגדרה שלך.
- מומנט נמוך: ה- 28byj-48 אינו מנוע מונע גבוה. ודא שהוא לא עומס יתר על המידה.
יישומים של מנוע צעד 28byj-48
- מחווני מצלמה
- זרועות רובוטיות
- תריסים אוטומטיים
- מנגנוני מדפסת תלת מימד
מַסְקָנָה
הגדרת ושלטת בהצלחה על מנוע צעד 28byj-48 עם נהג ULN2003 וארדואינו. מנוע סביר ואמין זה מושלם לפרויקטים שונים של DIY. התנסו במהירויות, שלבים ושיטות בקרה שונות כדי להפוך את הפרויקטים שלכם לדינאמיים יותר!



































































































































