

AS5600 एक उच्च-रिज़ॉल्यूशन रोटरी चुंबकीय स्थिति सेंसर है जो 360 ° तक कोण को माप सकता है। अपने I2C इंटरफ़ेस के साथ, रोबोटिक्स, स्वचालन और अन्य अनुप्रयोगों में सटीक कोण माप के लिए रास्पबेरी पाई के साथ एकीकृत करना आसान है। यह गाइड बताता है कि कोणीय पदों को पढ़ने के लिए रास्पबेरी पाई के साथ AS5600 का उपयोग कैसे करें।
आपको क्या चाहिए
- रसभरी पाई (I2C समर्थन के साथ कोई भी मॉडल, जैसे, पीआई 3, पीआई 4)
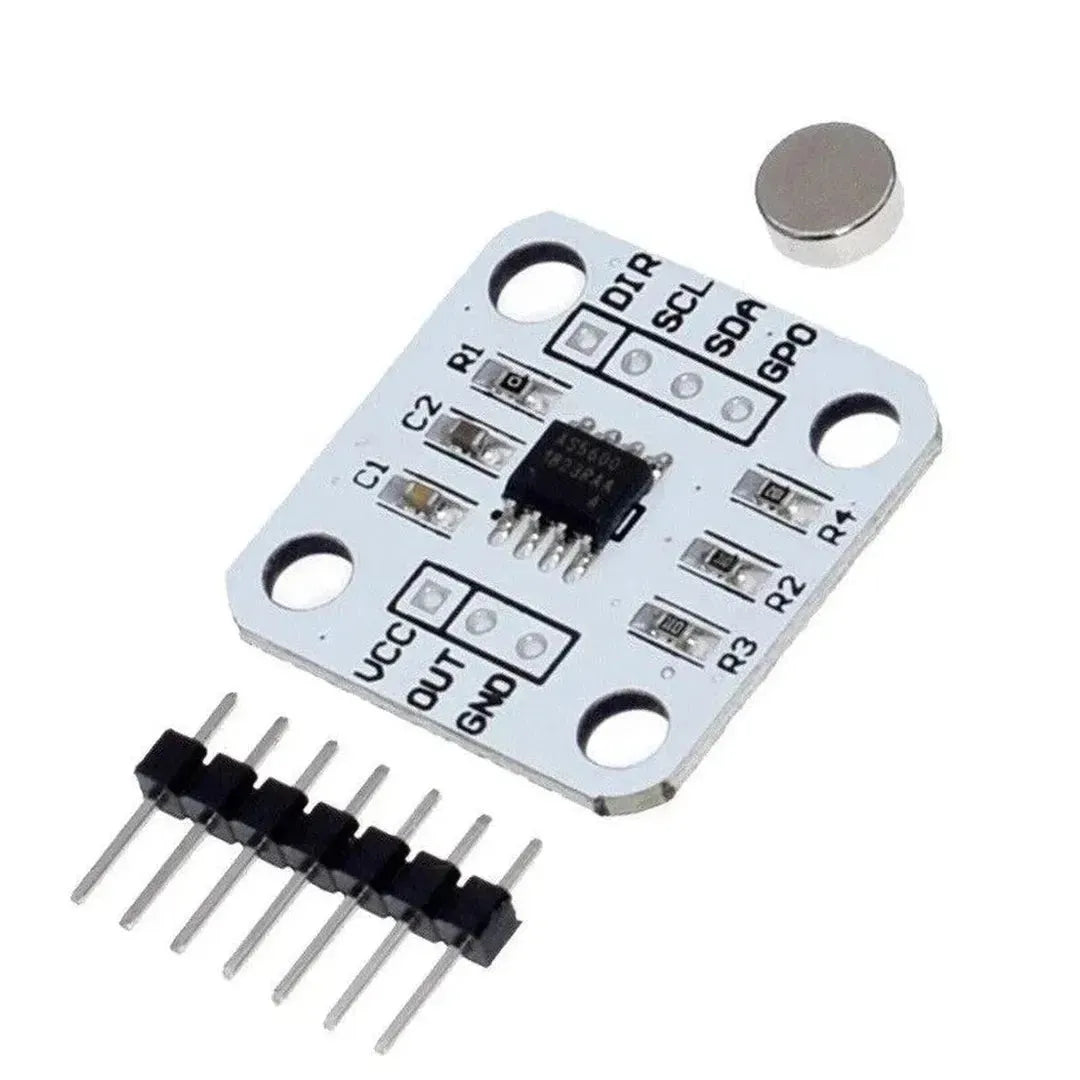
- AS5600 चुंबकीय रोटरी एनकोडर मॉड्यूल
- चुंबक (द्वितीयक मैग्नेटाइज्ड)
- ब्रेडबोर्ड और जम्पर तार
- रास्पबेरी पाई या कनेक्टेड कीबोर्ड और मॉनिटर के लिए SSH एक्सेस वाला कंप्यूटर
- रास्पबेरी पाई पर पायथन स्थापित
चरण 1: रास्पबेरी पाई पर I2C सक्षम करें
- अपने रास्पबेरी पाई पर टर्मिनल खोलें।
- रास्पबेरी पाई कॉन्फ़िगरेशन टूल चलाएं:
sudo raspi-config - नेविगेट करना इंटरफ़ेस विकल्प> I2C, और इसे सक्षम करें।
- रास्पबेरी पाई को रिबूट करें:
sudo reboot
चरण 2: रास्पबेरी पाई को AS5600 वायरिंग
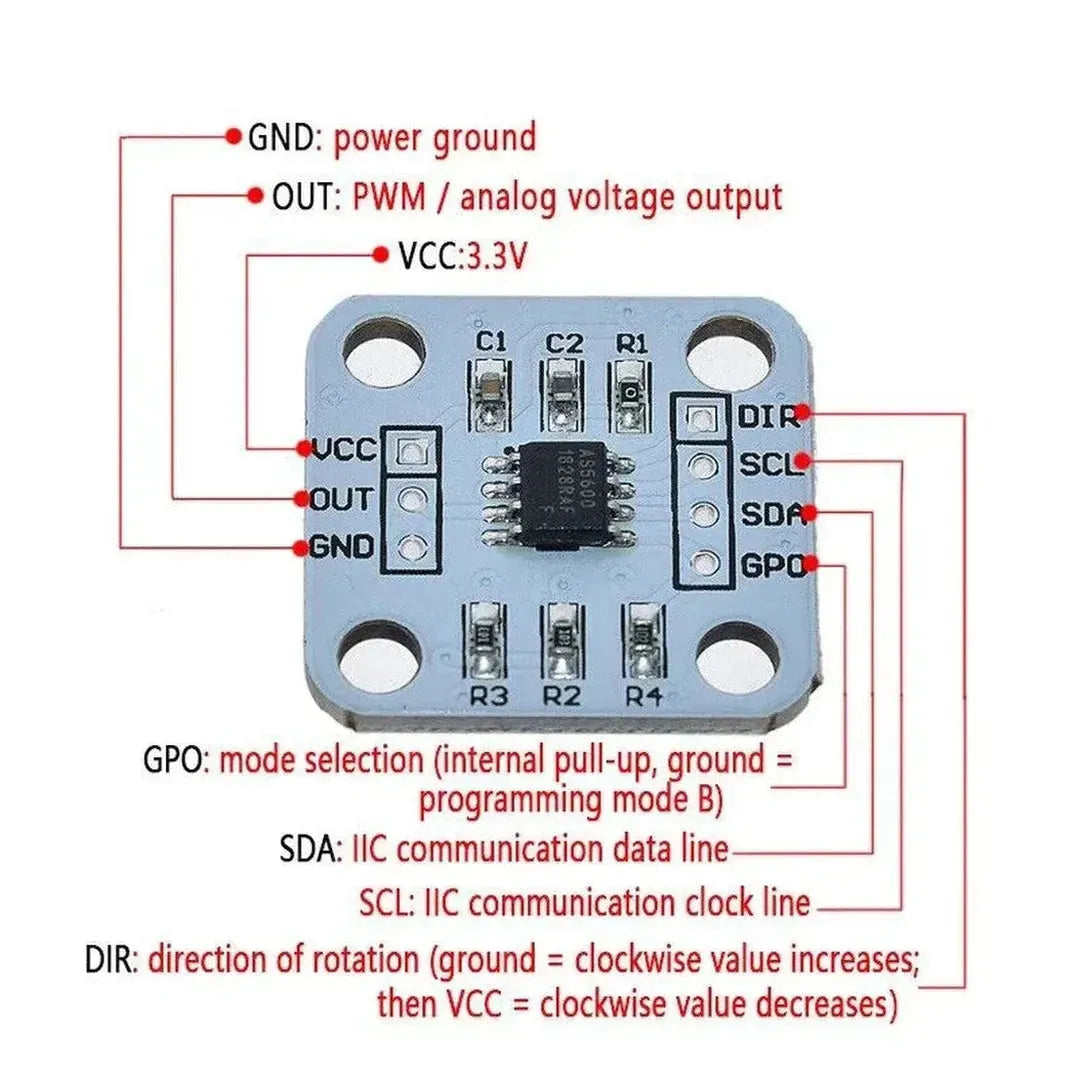
AS5600 संचार के लिए I2C प्रोटोकॉल का उपयोग करता है। इसे इस प्रकार रास्पबेरी पाई से कनेक्ट करें:
| AS5600 पिन | रास्पबेरी पाई पिन |
|---|---|
| वीसीसी | 3.3V (पिन 1) |
| Gnd | ग्राउंड (पिन 6) |
| एसएडीए | एसडीए (पिन 3, जीपीआईओ 2) |
| आयोग | SCL (पिन 5, GPIO3) |
टिप्पणी: सुनिश्चित करें कि AS5600 मॉड्यूल का ऑपरेटिंग वोल्टेज रास्पबेरी पाई के 3.3V लॉजिक स्तर से मेल खाता है।
चरण 3: आवश्यक उपकरण और पुस्तकालय स्थापित करें
- रास्पबेरी पाई को अपडेट करें:
sudo apt update && sudo apt upgrade -y - I2C उपकरण स्थापित करें:
sudo apt install -y i2c-tools - I2C संचार के लिए पायथन लाइब्रेरी स्थापित करें:
pip install smbus2
चरण 4: I2C कनेक्शन सत्यापित करें
- I2C बस पर AS5600 का पता लगाएं:
sudo i2cdetect -y 1 - आपको एक डिवाइस पता देखना चाहिए (जैसे,
0x36) आउटपुट में। यदि नहीं, तो अपनी वायरिंग की जाँच करें।
चरण 5: AS5600 से डेटा पढ़ें
AS5600 I2C के माध्यम से 12-बिट कोण डेटा प्रदान करता है। कोणीय स्थिति को पढ़ने और प्रदर्शित करने के लिए आप निम्नलिखित पायथन स्क्रिप्ट का उपयोग कर सकते हैं।
पायथन कोड उदाहरण
import smbus2
import time
# Define I2C address and bus
AS5600_ADDR = 0x36
ANGLE_REG = 0x0E
bus = smbus2.SMBus(1)
def read_angle():
# Read two bytes from the angle register
raw_data = bus.read_i2c_block_data(AS5600_ADDR, ANGLE_REG, 2)
angle = (raw_data[0] << 8) | raw_data[1] # Combine MSB and LSB
angle = angle & 0x0FFF # Mask to 12 bits
return (angle / 4096.0) * 360.0 # Convert to degrees
try:
while True:
angle = read_angle()
print(f"Angle: {angle:.2f} degrees")
time.sleep(0.5)
except KeyboardInterrupt:
print("Exiting...")
चरण 6: AS5600 के आवेदन
AS5600 बहुमुखी है और इसका उपयोग विभिन्न परियोजनाओं में किया जा सकता है:
- रोबोटिक्स: सटीक नियंत्रण के लिए संयुक्त या पहिया कोणों को मापें।
- एनकोडर: CNC मशीनों या 3D प्रिंटर के लिए DIY रोटरी एनकोडर बनाएं।
- KNOB नियंत्रण: वॉल्यूम या मेनू नेविगेशन के लिए एक उच्च-रिज़ॉल्यूशन घुंडी के रूप में उपयोग करें।
- स्थिति ट्रैकिंग: स्वचालन प्रणालियों में कोणीय पदों को ट्रैक करें।
समस्या निवारण
-
डिवाइस का पता नहीं चला:
- SDA और SCL कनेक्शन को सत्यापित करें।
- सुनिश्चित करें कि I2C रास्पबेरी पाई पर सक्षम है।
- AS5600 के ऑपरेटिंग वोल्टेज की जाँच करें।
-
गलत रीडिंग:
- सुनिश्चित करें कि चुंबक को AS5600 सेंसर के साथ सही ढंग से संरेखित किया गया है।
- सटीक माप के लिए एक डायमेट्रिक रूप से चुंबकित चुंबक का उपयोग करें।
-
I2C त्रुटियां:
- I2C बस का उपयोग करके परस्पर विरोधी उपकरणों की जाँच करें
i2cdetect. - AS5600 का पता स्क्रिप्ट से मेल खाता है।
- I2C बस का उपयोग करके परस्पर विरोधी उपकरणों की जाँच करें
निष्कर्ष
AS5600 चुंबकीय रोटरी स्थिति सेंसर कोणों को मापने के लिए एक शक्तिशाली और आसानी से उपयोग करने वाला उपकरण है। इस गाइड का पालन करके, आप रोबोटिक्स, ऑटोमेशन और बहुत कुछ के लिए सटीक घूर्णी माप प्रणाली बनाने के लिए एक रास्पबेरी पाई के साथ AS5600 को एकीकृत कर सकते हैं। इस बहुमुखी सेंसर की पूरी क्षमता को अनलॉक करने के लिए विभिन्न अनुप्रयोगों के साथ प्रयोग करें!



































































































































