





मोटर वाहन और औद्योगिक अनुप्रयोगों के दायरे में, कई माइक्रोकंट्रोलर्स के बीच विश्वसनीय संचार सर्वोपरि है। नियंत्रक क्षेत्र नेटवर्क (CAN) बस प्रोटोकॉल ऐसी जरूरतों के लिए एक मजबूत समाधान के रूप में उभरा है। यह ब्लॉग पोस्ट CAN बस प्रोटोकॉल के फंडामेंटल में बताता है और प्रदर्शित करता है कि MCP2515 को कैसे एकीकृत किया जाए, एक Arduino के साथ नियंत्रक हो सकता है, जिससे आपकी परियोजनाओं में सहज संचार को सक्षम किया जा सके।
बस प्रोटोकॉल क्या हो सकता है?
कंट्रोलर एरिया नेटवर्क (CAN) बस एक मजबूत वाहन बस मानक है जिसे माइक्रोकंट्रोलर और उपकरणों को मेजबान कंप्यूटर के बिना एक दूसरे के साथ संवाद करने की अनुमति देने के लिए डिज़ाइन किया गया है। 1980 के दशक में बॉश द्वारा विकसित, कैन बस ऑटोमोटिव सिस्टम में एक मानक बन गया है, लेकिन इसका व्यापक रूप से औद्योगिक स्वचालन और अन्य एम्बेडेड सिस्टम में भी उपयोग किया जाता है।
कैन बस प्रोटोकॉल की प्रमुख विशेषताओं में शामिल हैं:
- मल्टी-मास्टर कॉन्फ़िगरेशन: कई नोड्स केंद्रीय नियंत्रक के बिना एक ही बस में संवाद कर सकते हैं।
- संदेश प्राथमिकता: संदेशों को उनके पहचानकर्ता के आधार पर प्राथमिकता दी जाती है, यह सुनिश्चित करना कि महत्वपूर्ण डेटा पहले प्रसारित किया जाता है।
- त्रुटि का पता लगाना: सीआरसी चेक और पावती बिट्स सहित मजबूत त्रुटि का पता लगाने वाले तंत्र, विश्वसनीयता बढ़ाते हैं।
- उच्च गति संचार: वास्तविक समय के अनुप्रयोगों के लिए उपयुक्त, 1 एमबीपीएस तक डेटा दरों का समर्थन करता है।
ये विशेषताएं उन परिदृश्यों के लिए बस आदर्श बना सकती हैं जहां कई उपकरणों को कुशलतापूर्वक और मज़बूती से संवाद करने की आवश्यकता होती है, जैसे कि वाहन इंजन प्रबंधन प्रणाली, औद्योगिक स्वचालन और रोबोटिक्स में।
MCP2515 कैन कंट्रोलर का परिचय
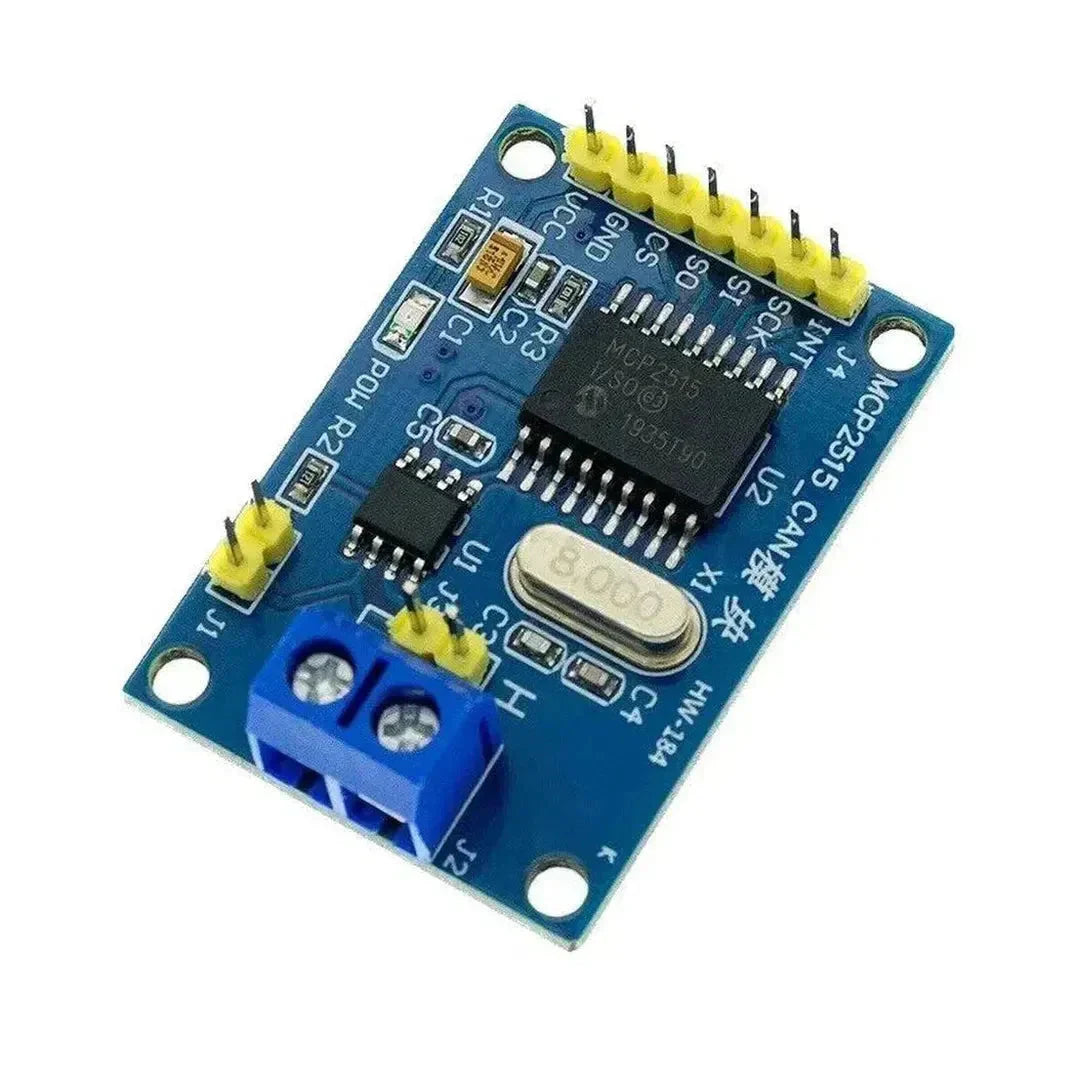
MCP2515 एक स्टैंड-अलोन कंट्रोलर एरिया नेटवर्क (CAN) कंट्रोलर है जो सीरियल पेरिफेरल इंटरफेस (SPI) के माध्यम से माइक्रोकंट्रोलर्स के साथ इंटरफेस करता है। यह जटिल प्रोटोकॉल को संभालता है, जिससे डेवलपर्स को उच्च-स्तरीय एप्लिकेशन लॉजिक पर ध्यान केंद्रित करने की अनुमति मिलती है। MCP2515 की प्रमुख विशेषताओं में शामिल हैं:
- मानक और विस्तारित के लिए समर्थन फ्रेम कर सकते हैं।
- अंतर्निहित त्रुटि से निपटने और फ़िल्टरिंग तंत्र।
- Arduino सहित विभिन्न माइक्रोकंट्रोलर्स के साथ संगतता।
- कम बिजली की खपत, यह एम्बेडेड सिस्टम के लिए उपयुक्त है।
MCP2515 को एक Arduino के साथ एकीकृत करके, आप अपनी परियोजनाओं में बस क्षमताओं को जोड़ सकते हैं, अन्य कैन-सक्षम उपकरणों या नेटवर्क के साथ संचार को सक्षम कर सकते हैं।
Arduino के साथ MCP2515 की स्थापना
आरंभ करने के लिए, आपको निम्नलिखित घटकों की आवश्यकता होगी:
- Arduino बोर्ड (जैसे, Arduino Uno)
- MCP2515 मॉड्यूल कर सकते हैं (अक्सर एक TJA1050 के साथ आता है ट्रांसीवर कर सकते हैं)
- जम्पर तार
- ब्रेडबोर्ड (वैकल्पिक)
यहाँ अपने Arduino के साथ MCP2515 की स्थापना के लिए एक चरण-दर-चरण मार्गदर्शिका है:
1। MCP2515 को Arduino को वायरिंग करें
MCP2515 मॉड्यूल को Arduino से कनेक्ट करें:
- वीसीसी को 5V Arduino पर
- Gnd को Gnd Arduino पर
- सी को पिन 10 Arduino पर
- संप्रदाय को पिन 13 Arduino पर
- साई (मोसी) को पिन ११ Arduino पर
- इसलिए (मिसो) को पिन 12 Arduino पर
- int यहाँ को पिन २ Arduino पर
Arduino MCP2515
------- -------
5V ------> VCC
GND ------> GND
Pin 10 ------> CS
Pin 13 ------> SCK
Pin 11 ------> SI (MOSI)
Pin 12 ------> SO (MISO)
Pin 2 ------> INT
2। आवश्यक पुस्तकालयों को स्थापित करना
MCP2515 के साथ संवाद करने के लिए, आपको इसकी आवश्यकता होगी mcp_can पुस्तकालय। इसे Arduino लाइब्रेरी मैनेजर के माध्यम से स्थापित करें:
- Arduino ide खोलें।
- नेविगेट करना स्केच> लाइब्रेरी शामिल करें> पुस्तकालयों का प्रबंधन करें ...
- निम्न को खोजें MCP_CAN और स्थापित करें MCP_CAN Cory J. Fowler द्वारा लाइब्रेरी।
3। उदाहरण कोड अपलोड करना
यहाँ MCP2515 और Arduino का उपयोग करके संदेश भेजने और प्राप्त करने के लिए एक मूल उदाहरण है:
एक संदेश भेजना
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
byte data[] = {0x00, 0xFF, 0xAA, 0x55, 0x33, 0x66, 0x99, 0xCC};
// Send data: CAN ID = 0x100, data length = 8
if (CAN0.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully!");
} else {
Serial.println("Error Sending Message...");
}
delay(1000);
}
एक संदेश प्राप्त कर सकते हैं
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
unsigned long canId;
byte len = 0;
byte buf[8];
// Check if data has been received
if (CAN0.checkReceive() == CAN_MSGAVAIL) {
CAN0.readMsgBuf(&canId, &len, buf);
Serial.print("CAN ID: 0x");
Serial.println(canId, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
भेजने वाले स्केच में, Arduino ID के साथ एक संदेश संदेश प्रसारित करता है 0x100 हर सेकंड। प्राप्त करने वाले स्केच इनकमिंग के लिए सुनता है और आईडी और डेटा को सीरियल मॉनिटर पर प्रिंट और प्रिंट कर सकता है।
Arduino के साथ कैन बस के आवेदन
Arduino के साथ कैन बस को एकीकृत करना मोटर वाहन प्रणालियों से परे कई अनुप्रयोगों को खोलता है। कुछ लोकप्रिय उपयोग के मामलों में शामिल हैं:
- रोबोटिक्स: कई मोटर नियंत्रकों और सेंसर के बीच संचार सक्षम करें।
- औद्योगिक स्वचालन: विभिन्न मशीनरी और नियंत्रण इकाइयों के बीच डेटा एक्सचेंज की सुविधा।
- होम ऑटोमेशन: एक एकीकृत नेटवर्क के भीतर विभिन्न स्मार्ट उपकरणों को कनेक्ट करें।
- डेटा अधिग्रहण प्रणाली: कुशलता से कई सेंसर से डेटा एकत्र करें और संसाधित करें।
निष्कर्ष
कैन बस प्रोटोकॉल, अपनी विश्वसनीयता और दक्षता के साथ, कई एम्बेडेड सिस्टम में संचार के लिए एक रीढ़ के रूप में कार्य करता है। MCP2515 का उपयोग करके एक Arduino के साथ नियंत्रक कर सकते हैं, डेवलपर्स आसानी से अपनी परियोजनाओं में बस क्षमताओं को एकीकृत कर सकते हैं। चाहे आप ऑटोमोटिव सिस्टम, औद्योगिक स्वचालन, या जटिल रोबोटिक्स पर काम कर रहे हों, समझ और लीवरेजिंग बस आपके सिस्टम के संचार ढांचे को काफी बढ़ा सकती है।
प्रदान किए गए व्यापक गाइडों और उदाहरणों के साथ, आप अपने अगले Arduino परियोजना में कैन बस को एकीकृत करने के लिए अच्छी तरह से सुसज्जित हैं। हैप्पी कोडिंग!

















































































































































