
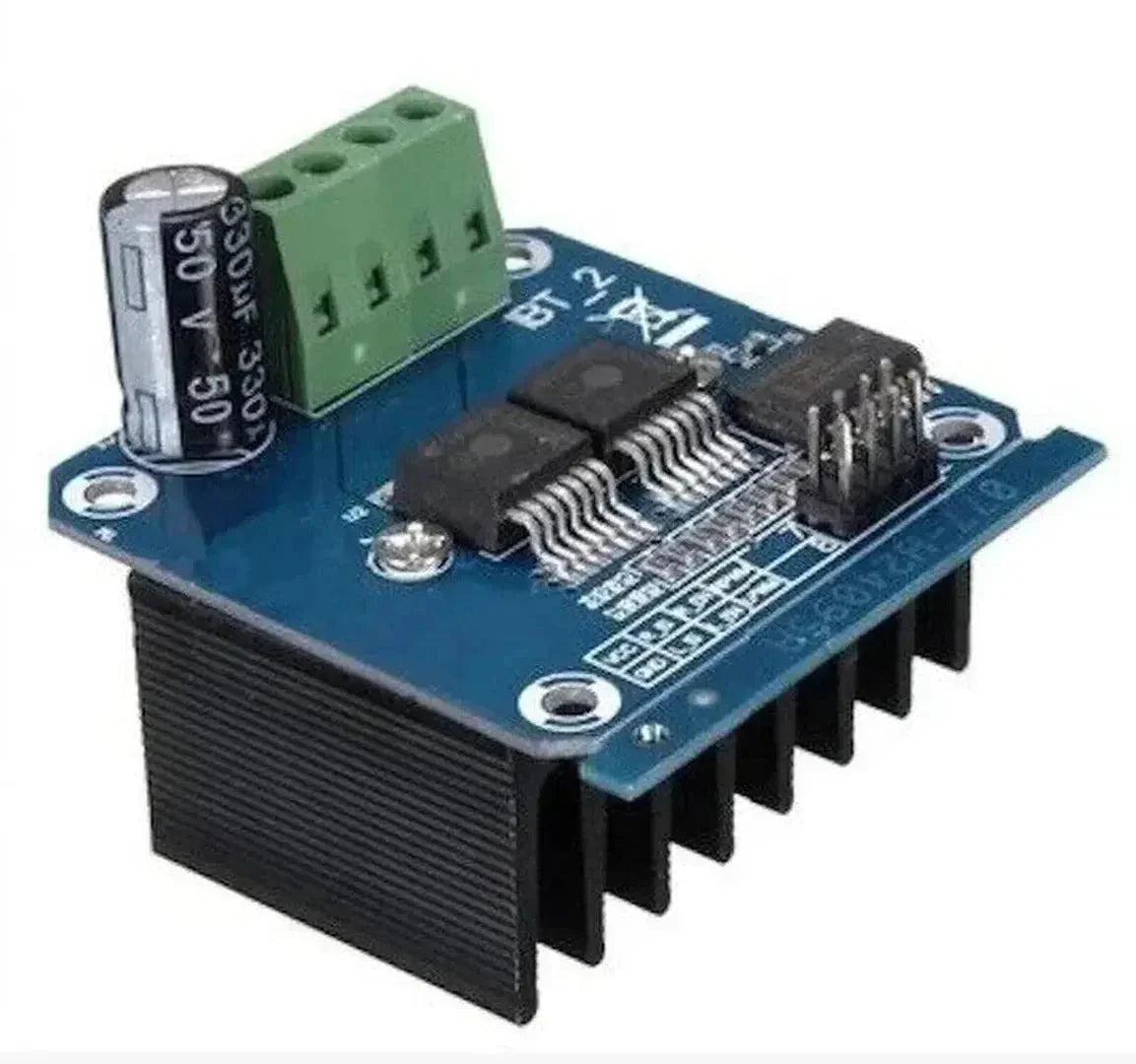
A BTS7960 egy nagy teljesítményű H-híd motoros vezető modul, amely képes kezelni a nagy áramot és a feszültséget, így ideális a nagy egyenáramú motorok vezetéséhez. Biztosítja a PWM vezérlést, a túláram-védelmet és a hatékony hőeloszlását, így tökéletes a robotikához, az RC autókhoz és más nagy teljesítményű motoros alkalmazásokhoz. Ez az oktatóanyag vezeti Önt a BTS7960 és az Arduino összekapcsolásán.
Mire lesz szüksége
- BTS7960 Motor illesztőprogram modul
- Arduino Board (például Uno, Mega, Nano)
- Egyenáramú motor
- Külső tápegység a motor számára (a motor feszültségének megfelelően)
- Jumper vezetékek
- Egy számítógép, amelyen az Arduino IDE telepített
1. lépés: A BTS7960 csapok megértése
A BTS7960 modul a következő kulcscsapokkal rendelkezik:
| Csap | Funkció |
|---|---|
| VCC | Logikai tápegység (5V) |
| GND | Föld |
| R_en | Jobb motor engedélyezése (aktív magas) |
| L_en | A bal motor engedélyezése (aktív magas) |
| R_PWM | Jobb motor PWM bemenet |
| L_pwm | Bal motor PWM bemenet |
| MOTOR_A | Motoros terminál a |
| Motor_b | B motoros terminál |
| Virtuális gép | Motor tápegység (feszültségbemenet) |
| GND | Föld |
2. lépés: A BTS7960 vezetékesítése Arduino -ra
Az alábbiakban bemutatjuk a kábelezési útmutatót a BTS7960 csatlakoztatásához egy Arduino UNO -hoz:
| BTS7960 PIN | Arduino Pin |
|---|---|
| VCC | 5 V -os |
| GND | GND |
| R_en | 4. érintkező |
| L_en | 5. érintkező |
| R_PWM | 6. érintkező |
| L_pwm | 7. érintkező |
| MOTOR_A | Motoros terminál a |
| Motor_b | B motoros terminál |
| Virtuális gép | Motor teljesítmény (+) |
| GND | Motor teljesítmény (-) |
Jegyzet: Ellenőrizze, hogy a külső tápegység megfelel -e a motor feszültségének és áramigényének.
3. lépés: Töltse fel a kódot
Íme egy példa kód a motor irányának és sebességének szabályozására:
#define R_EN 4
#define L_EN 5
#define R_PWM 6
#define L_PWM 7
void setup() {
pinMode(R_EN, OUTPUT);
pinMode(L_EN, OUTPUT);
pinMode(R_PWM, OUTPUT);
pinMode(L_PWM, OUTPUT);
Serial.begin(9600);
Serial.println("BTS7960 Motor Driver Test");
}
void loop() {
// Forward motion
digitalWrite(R_EN, HIGH);
digitalWrite(L_EN, LOW);
analogWrite(R_PWM, 150); // Set speed (0-255)
analogWrite(L_PWM, 0);
delay(2000);
// Stop
digitalWrite(R_EN, LOW);
digitalWrite(L_EN, LOW);
analogWrite(R_PWM, 0);
analogWrite(L_PWM, 0);
delay(1000);
// Reverse motion
digitalWrite(R_EN, LOW);
digitalWrite(L_EN, HIGH);
analogWrite(R_PWM, 0);
analogWrite(L_PWM, 150); // Set speed (0-255)
delay(2000);
// Stop
digitalWrite(R_EN, LOW);
digitalWrite(L_EN, LOW);
analogWrite(R_PWM, 0);
analogWrite(L_PWM, 0);
delay(1000);
}
4. lépés: Tesztelje a beállítást
- Csatlakoztassa az Arduino -t a számítógépéhez USB -n keresztül.
- Nyissa meg az Arduino IDE -t, és válassza ki a megfelelőt Bizottság és Kikötő a Szerszámok menü.
- Töltse fel a kódot kattintással Feltöltés gomb.
- Miután a kód feltöltötte, a motor váltakozik az előre és a fordított mozgás között, szünetek között.
Hibaelhárítás
- A motor nem forog: Győződjön meg arról, hogy a motor tápegysége csatlakoztatva van, és megfelel a motor feszültségkövetelményeinek.
- Rendkívüli mozgás: Ellenőrizze az összes csatlakozást, különösen a motoros csatlakozókat és a PWM csapokat.
- Túlmelegedés: Ha a motorvezető túlmeleged, biztosítja a megfelelő hőeloszlás megfelelőségét, és ellenőrizze, hogy a motor árama nem haladja meg a modul besorolását.
A BTS7960 alkalmazásai
- Robotjárművek
- Szállítószalagrendszerek
- Motorizált kapuk
- Nagy teljesítményű motorvezérlés ipari beállításokban
Következtetés
Sikeresen összekapcsolja a BTS7960 motoros illesztőprogramot egy Arduino -val, és egy DC -motort vezérelt. Ez a sokoldalú illesztőprogram tökéletes a nagy teljesítményű alkalmazásokhoz, amelyek pontos irányítást igényelnek. Kísérletezzen különböző PWM -értékekkel a motor sebességének ellenőrzéséhez és saját motoros projektjeinek felépítéséhez!



































































































































