




A 28BYJ-48 léptetőmotor egy népszerű, megfizethető léptetőmotor, amelyet gyakran használnak a DIY elektronikai projektekben. Az ULN2003 illesztőprogrammal párosítva kiváló választás az alkalmazásokhoz, amelyek pontos mozgást igényelnek, például robotikát, kamera csúszkákat és otthoni automatizálást. Ez az oktatóanyag vezeti Önt az Arduino-val a 28BYJ-48 léptetőmotor beállításán és irányításán.
Mire lesz szüksége
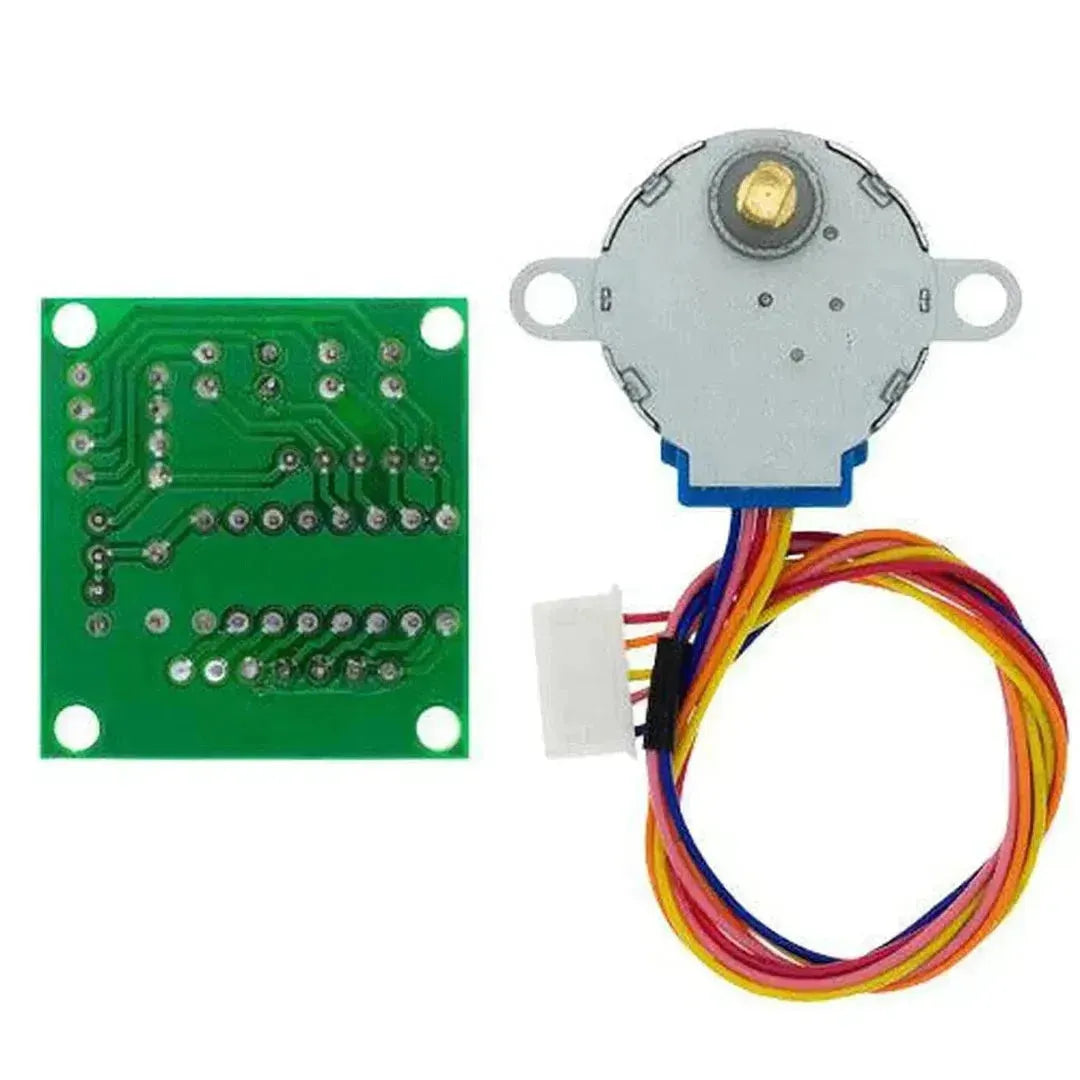
- 28BYJ-48 Stepper Motor
- ULN2003 Driver Board
- Arduino Board (például Uno, Mega, Nano)
- Jumper vezetékek
- Kenyérlemez (opcionális)
- Egy számítógép, amelyen az Arduino IDE telepített
1. lépés: Az alkatrészek megértése
28BYJ-48 léptetőmotor
- A 28BYJ-48 egy 4 fázisú, 5 vezetékes léptetőmotor, körülbelül 1:64 sebességváltó-redukciós arányt, pontos és megbízhatóvá téve.
ULN2003 vezető tábla
- Az ULN2003 egy sofőr tábla, amelyet kifejezetten a 28BYJ-48 motorra terveztek. Ez magában foglalja a LED -eket, amelyek jelzik a motor aktív fázisát, és egyszerűsítik az Arduino -hoz való kapcsolatokat.
2. lépés: Az ULN2003 vezetékesítése Arduino -hoz
-
Csatlakoztassa a 28BYJ-48 motort az ULN2003 vezető táblához. A motor csatlakozója közvetlenül illeszkedik a táblán "be" feliratú fejlécbe.
-
Használjon jumper vezetékeket az ULN2003 vezető tábla csatlakoztatásához az Arduino -hoz, az alábbiak szerint:
| ULN2003 PIN | Arduino Pin |
|---|---|
| In1 | 8. érintkező |
| In2 | 9. érintkező |
| In3 | 10. érintkező |
| In4 | 11. érintkező |
| VCC | 5 V -os |
| GND | GND |
3. lépés: Telepítse a Stepper könyvtárat
Az Arduino IDE tartalmaz egy beépített könyvtárat a léptetőmotor-vezérléshez.
- Nyissa meg az Arduino IDE -t.
- Elindul Vázlat > Tartalmazza a könyvtárat > Lépcső.
4. lépés: Töltse fel a kódot
Itt található egy alapvető példakód a léptetőmotor vezérléséhez:
#include <Stepper.h>
// Define the number of steps per revolution for the 28BYJ-48 motor
#define STEPS_PER_REV 2048
// Initialize the Stepper library on pins 8, 9, 10, and 11
Stepper stepper(STEPS_PER_REV, 8, 10, 9, 11);
void setup() {
stepper.setSpeed(15); // Set motor speed (in RPM)
Serial.begin(9600);
Serial.println("28BYJ-48 Stepper Motor Test");
}
void loop() {
Serial.println("Moving Forward");
stepper.step(STEPS_PER_REV); // Move one full revolution forward
delay(1000);
Serial.println("Moving Backward");
stepper.step(-STEPS_PER_REV); // Move one full revolution backward
delay(1000);
}
5. lépés: Tesztelje a beállítást
- Csatlakoztassa az Arduino -t a számítógépéhez USB -n keresztül.
- Nyissa meg az Arduino IDE -t, és válassza ki a megfelelőt Bizottság és Kikötő a Szerszámok menü.
- Töltse fel a kódot az Arduino -ba kattintással Feltöltés.
- Once the code is uploaded, the stepper motor should rotate one full revolution forward and then backward repeatedly.
Advanced Control with Acceleration
Simább és pontosabb vezérléshez használhatja a Accelstepper Könyvtár a beépített léptető könyvtár helyett. Íme egy példa:
#include <AccelStepper.h>
// Define the motor interface type
#define HALFSTEP 8
// Initialize the AccelStepper library
AccelStepper stepper(HALFSTEP, 8, 10, 9, 11);
void setup() {
stepper.setMaxSpeed(1000); // Set maximum speed
stepper.setAcceleration(500); // Set acceleration
stepper.setSpeed(200); // Set initial speed
}
void loop() {
stepper.runSpeed(); // Continuous rotation
}
Hibaelhárítás
- A motor nem mozog: Ellenőrizze az összes csatlakozást, és ellenőrizze, hogy a megfelelő csapok meghatározzák a kódban.
- Rendkívüli mozgás: Ellenőrizze, hogy a motor tápegysége elegendő -e, és a kód megegyezik a beállításával.
- Alacsony nyomaték: A 28BYJ-48 nem egy magas torkú motor. Ensure it’s not overloaded.
Applications of 28BYJ-48 Stepper Motor
- Kamera csúszkák
- Robotfegyverek
- Automatizált redőnyök
- 3D nyomtatómechanizmusok
Következtetés
Sikeresen beállította és irányította a 28BYJ-48 léptetőmotort az ULN2003 sofőrrel és az Arduino-val. Ez a megfizethető és megbízható motor tökéletes különféle barkácsolási projektekhez. Kísérletezzen különböző sebességekkel, lépésekkel és ellenőrzési módszerekkel, hogy a projektek dinamikusabbá váljanak!



































































































































