Az Arduino CNC Shield v3.0 egy népszerű pajzs, amelynek célja a CNC gépek, például a 3D nyomtatók, a lézervágók és a marógépek vezérlésének egyszerűsítése. Párosítva egy Arduino és Stepper Motor meghajtókkal, lehetővé teszi a több tengely pontos vezérlését. Ebben az oktatóanyagban átvezetjük Önt a CNC Shield v3.0 beállításán és felhasználásán az Arduino -val.
Mire lesz szüksége
- Arduino Board (például UNO)
- CNC SHIELD V3.0
- Stepper Motor illesztőprogramok (például A4988 vagy DRV8825)
- Léptetőmotorok
- Külső tápegység (12 V-36 V motorokhoz)
- Jumper vezetékek (opcionális)
- GRBL firmware (nyílt forrású CNC firmware)
- Egy számítógép, amelyen az Arduino IDE telepített
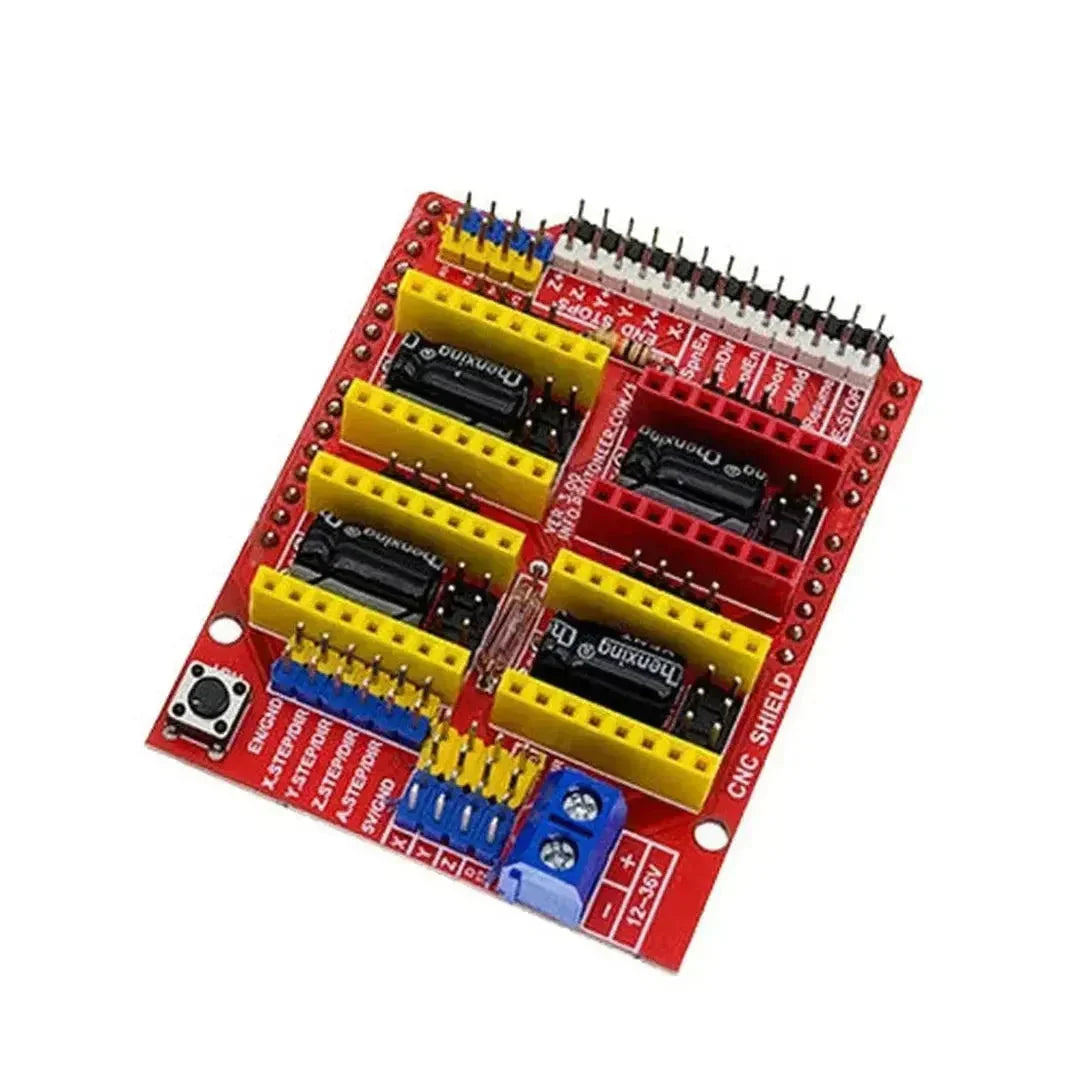
1. lépés: Értse meg a CNC Shield v3.0 -t
A CNC Shield v3.0-t az Arduino UNO-val való kompatibilitáshoz tervezték, és támogatja a GRBL-t, egy nyílt forráskódú firmware-t a CNC gépek vezérléséhez. A legfontosabb jellemzők a következők:
- Legfeljebb 4 tengely támogatása (x, y, z, a).
- Támogatás a mikroszteppáláshoz a léptítő motoros illesztőprogram -konfigurációján keresztül.
- Csapok a határkapcsolókhoz és a vészhelyzeti leállító gombhoz.
- Fejlécek a léptetőmotor -illesztőprogramokhoz (A4988 vagy DRV8825).
CNC pajzs v3.0 elrendezés
- Léptetőmotor kimenetek: Csatlakoztassa a léptetőmotorokat a címkézett X, Y, Z és a fejlécekhez.
- Vezető résidők: Szerelje be a léptetőmotoros illesztőprogramokat (például A4988) az X, Y, Z és egy résidőkbe.
- Limit kapcsoló bemenetek: Csatlakoztassa a limit kapcsolókat a megfelelő csapokra.
- Teljesítmény -bemenet: Használjon külső tápegységet (12 V-36 V) a motorokhoz.
2. lépés: Szerelje össze a pajzsot
-
Szerelje be a léptetőmotor illesztőprogramokat:
- Helyezze be az egyes léptetőmotor -hajtóhajtót az X, Y, Z és A. jelölt résbe. Ellenőrizze, hogy a tájolás megegyezik a pajzsmal ellátott diagrammal (általában a potenciométer kifelé nézve).
- Csatlakoztassa a hűtőszekrényeket a vezető chipshez a jobb hőeloszlás érdekében.
-
Állítsa be a mikrosteppinget:
- Használja a pajzson lévő ugrókat az egyes tengelyek mikroszteppálásának konfigurálásához. A mikrostepping konfigurációkhoz lásd az illesztőprogram adatlapját (például 1/16 vagy 1/32 lépés).
-
Csatlakoztassa a léptetőmotorokat:
- Csatlakoztassa a léptetőmotor vezetékeit az x, y, z és a pajzs kimenetéhez.
-
Tápegység:
- Csatlakoztasson egy külső tápegységet a pajzs teljesítménybemenetéhez (12V-36V). Győződjön meg arról, hogy motorjai kompatibilisek -e a feszültséggel.
-
Csatlakozás Arduino -hoz:
- Helyezze a CNC Shield v3.0 -t az Arduino UNO tetejére, igazítva a csapokat.
3. lépés: Telepítse a GRBL firmware -t az Arduino -ra
-
Letöltés GRBL firmware:
- Látogasson el a hivatalos GRBL GitHub tárolóba: Grbl GitHub.
- Töltse le a legfrissebb kiadást.
-
Telepítse a GRBL könyvtárat az Arduino IDE -be:
- Nyissa meg az Arduino IDE -t.
- Elindul Vázlat > Tartalmazza a könyvtárat > Add hozzá .zip könyvtár.
- Válassza ki a letöltött GRBL mappát.
-
Töltse fel a GRBL -t Arduino -ba:
- Nyissa meg az Arduino IDE -t, és válassza ki Irat > Példák > hintó > lyukasztás.
- Válassza ki a helyeset Bizottság és Kikötő a Szerszámok menü.
- Kattintás Feltöltés A GRBL betöltése az Arduino -ra.
4. lépés: Konfigurálja a GRBL beállításokat
-
Csatlakozzon a GRBL -hez:
- Használjon olyan soros kommunikációs eszközt, mint az Arduino Serial Monitor vagy egy dedikált CNC vezérlőszoftver (például Universal GCODE Sender).
- Állítsa az adatátviteli sebességet
115200.
-
Teszt GRBL:
- Küldje el a parancsot
$$Az aktuális GRBL beállítások megtekintéséhez. - Állítsa be a beállításokat, mint például a milliméterenkénti lépéseket, az előtolási sebességeket és a gyorsítást, ha szükséges. Például:
$100=250.0 (X-axis steps/mm) $101=250.0 (Y-axis steps/mm) $102=250.0 (Z-axis steps/mm)
- Küldje el a parancsot
-
Engedélyezze a határkapcsolókat (opcionális):
- Csatlakoztassa a limit kapcsolókat a pajzsra, és engedélyezze azokat a GRBL beállításokban:
$21=1 (Enable hard limits) $22=1 (Enable homing)
- Csatlakoztassa a limit kapcsolókat a pajzsra, és engedélyezze azokat a GRBL beállításokban:
5. lépés: Tesztelje a CNC pajzsot
-
Nyisson meg egy CNC vezérlési programot:
- Használjon olyan szoftvert, mint a Universal GCODE Sender (UGS) a CNC pajzs vezérléséhez.
-
Mozgassa a motorokat:
- Használjon kézi vezérlőket a szoftverben az X, Y és Z tengelyek mozgatásához. Ellenőrizze, hogy a léptetőmotorok jól reagálnak.
-
Töltsön be egy G-kódfájlt:
- Tesztelje a beállítást egy minta G-kódfájl betöltésével és a szoftverbe történő futtatásával.
Hibaelhárítás
-
A léptetőmotorok nem mozognak:
- Ellenőrizze az illesztőprogram orientációját, és ellenőrizze, hogy a jumperek mikroszteppálódnak -e.
- Ellenőrizze, hogy a külső tápegység csatlakoztatva és funkcionális -e.
-
Rendkívüli mozgás:
- Ellenőrizze a motoros csatlakozásokat és csökkentse a gyorsulási beállításokat a GRBL -ben.
-
Túlmelegítő járművezetők:
- Győződjön meg arról, hogy a megfelelő hűtőszekrények telepítve vannak, és fontolja meg a hűtőventilátor használatát.
A CNC SHIELD v3.0 alkalmazásai
- DIY CNC útválasztók
- 3D -s nyomtatók
- Lézeres metsző
- Plotter
Következtetés
Sikeresen beállította az Arduino CNC Shield v3.0 -ot a GRBL -hez való használatra. Ez a pajzs megkönnyíti a léptetőmotorok vezérlését és a saját CNC gép felépítését. Kísérletezzen különböző konfigurációkkal, és kezdje el életre kelteni a CNC projektjeit!














1 megjegyzés
Do you have any information regarding how to wire and configure system for dual end stop limit installations?