





L'MCP2515 è un modulo Bus Can (Controller Area Network) ampiamente utilizzato per la comunicazione automobilistica e industriale. Consente ad Arduino di interfacciarsi con i sistemi basati su CAN per inviare e ricevere dati in modo efficiente. Questo tutorial ti guiderà attraverso l'impostazione e l'utilizzo del modulo MCP2515 con Arduino.
Cosa avrai bisogno
- MCP2515 MODULO BUS
- Arduino Board (ad es. Uno, Mega, Nano)
- Dispositivo compatibile con Can-bus o un altro modulo MCP2515
- Fili jumper
- Breadboard (opzionale)
- Un computer con l'IDE Arduino installato
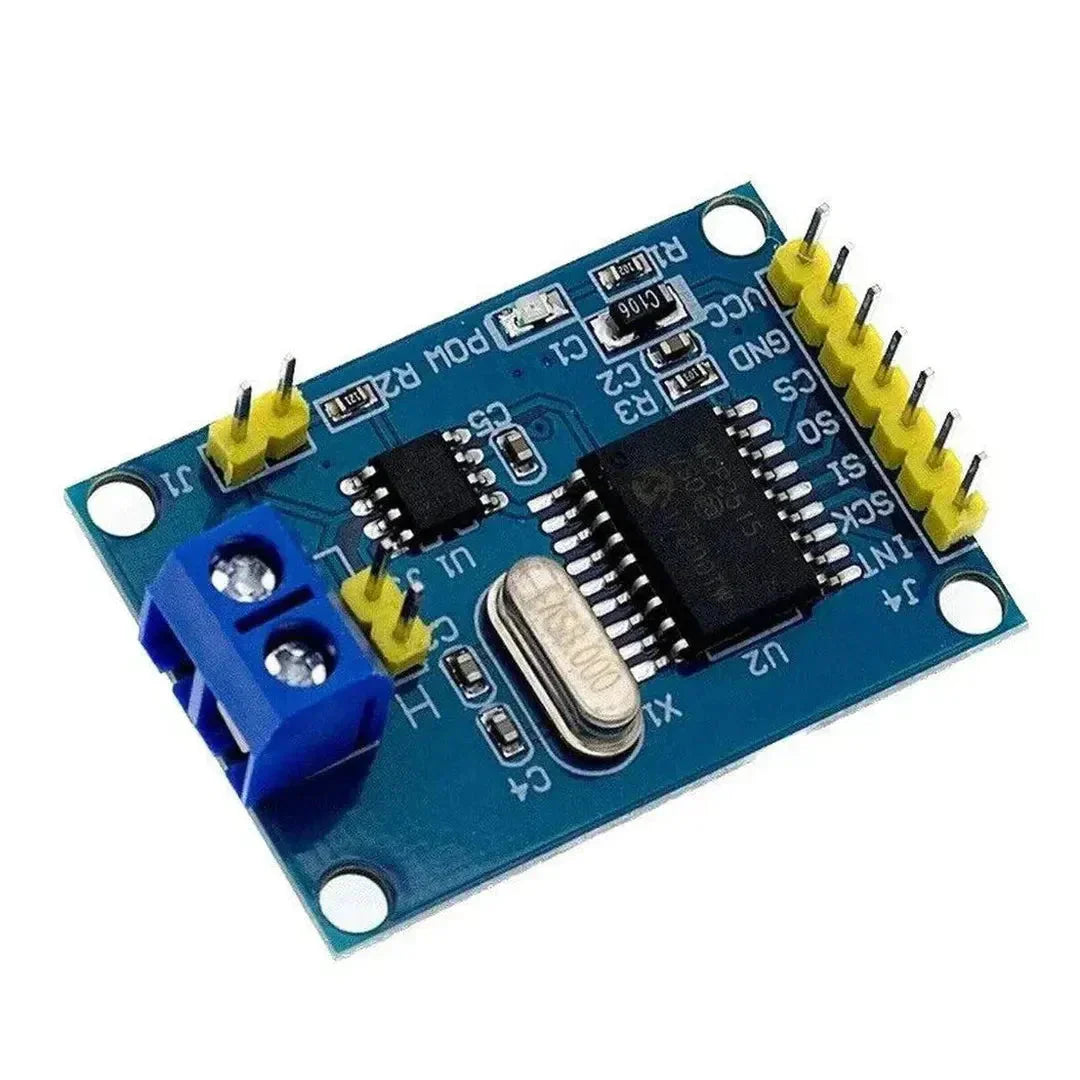
Passaggio 1: Comprensione del modulo MCP2515
Il modulo MCP2515 utilizza il ricetrasmettitore del controller IC MCP2515 IC e TJA1050. Il modulo comunica con l'Arduino tramite l'interfaccia SPI.
Pinout MCP2515
| Spillo | Funzione |
|---|---|
| VCC | Alimentazione (5V) |
| GND | Terra |
| Cs | CHIP Seleziona |
| COSÌ | Output dei dati SPI |
| Si | Input di dati SPI |
| SCK | COLLO SPI |
| Int | Interrompere l'output |
Passaggio 2: cablaggio l'MCP2515 ad Arduino
Di seguito è riportata la guida al cablaggio per la connessione del modulo MCP2515 a un Arduino Uno:
| PIN MCP2515 | Arduino Pin |
|---|---|
| VCC | 5v |
| GND | GND |
| Cs | Pin 10 |
| COSÌ | Pin 12 |
| Si | Pin 11 |
| SCK | Pin 13 |
| Int | Pin 2 |
Nota: Per altre schede Arduino, assicurarsi che i pin SPI corrisponda al pinout della tua scheda specifica.
Passaggio 3: installare la libreria richiesta
IL MCP_CAN La libreria semplifica l'interazione con il modulo MCP2515.
Passaggi per installare la libreria MCP_CAN:
- Apri l'IDE Arduino.
- Vai a Schizzo > Includi la libreria > Gestisci le biblioteche.
- Cerca "MCP_CAN" nel gestore della biblioteca.
- Clic Installare.
Passaggio 4: caricare il codice
Codice del trasmettitore (invio di dati sul bus CAN):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
if (CAN.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully");
} else {
Serial.println("Error Sending Message");
}
delay(1000); // Send data every second
}
Codice del ricevitore (lettura dei dati dal bus CAN):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char len = 0;
unsigned char buf[8];
if (CAN.checkReceive() == CAN_MSGAVAIL) {
CAN.readMsgBuf(&len, buf);
unsigned long id = CAN.getCanId();
Serial.print("Message ID: 0x");
Serial.println(id, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
Passaggio 5: testare l'installazione
- Collega il modulo MCP2515 al tuo Arduino come descritto nel passaggio 2.
- Carica il codice del trasmettitore su un Arduino e il codice del ricevitore su un altro Arduino.
- Collegare i pin CAN_H e CAN_L di entrambi i moduli MCP2515 per stabilire il bus CAN.
- Apri il monitor seriale su entrambi gli Arduinos e imposta il tasso di baud
115200. - Sul ricevitore Arduino, dovresti vedere i messaggi inviati dal trasmettitore Arduino.
Risoluzione dei problemi
- Nessun dato ricevuto: Controlla le connessioni CAN_H e CAN_L tra i moduli.
- Inizializzazione non riuscita: Assicurati che le connessioni SPI e il pin CS abbiano l'installazione.
- Comunicazione irregolare: Verificare che entrambi i moduli utilizzino lo stesso tasso di baud (500 kbps in questo esempio).
Applicazioni del modulo Bus MCP2515
- Diagnostica dei veicoli (OBD-II)
- Sistemi di automazione industriale
- Comunicazione robotica
- Dispositivi IoT con reti di autobus CAN
Conclusione
Hai impostato correttamente il modulo Bus MCP2515 con Arduino per l'invio e la ricezione di dati. Questo modulo è incredibilmente versatile per le applicazioni che richiedono comunicazioni affidabili rispetto a un bus CAN. Sperimenta con diversi ID dei messaggi e payload di dati per esplorare il suo pieno potenziale!



































































































































