Il driver del motore L9110S è una soluzione compatta ed efficiente per il controllo di motori DC e motori a passo passo nei progetti Arduino. Che tu stia costruendo un robot semplice o un sistema di automazione più complesso, L9110s offre un modo affidabile per gestire le operazioni motorie con cablaggio minimo e complessità di programmazione. In questo post sul blog, esploreremo le funzionalità del driver del motore L9110, come collegarlo a un Arduino e fornire il codice di esempio per iniziare.
Cos'è la L9110?
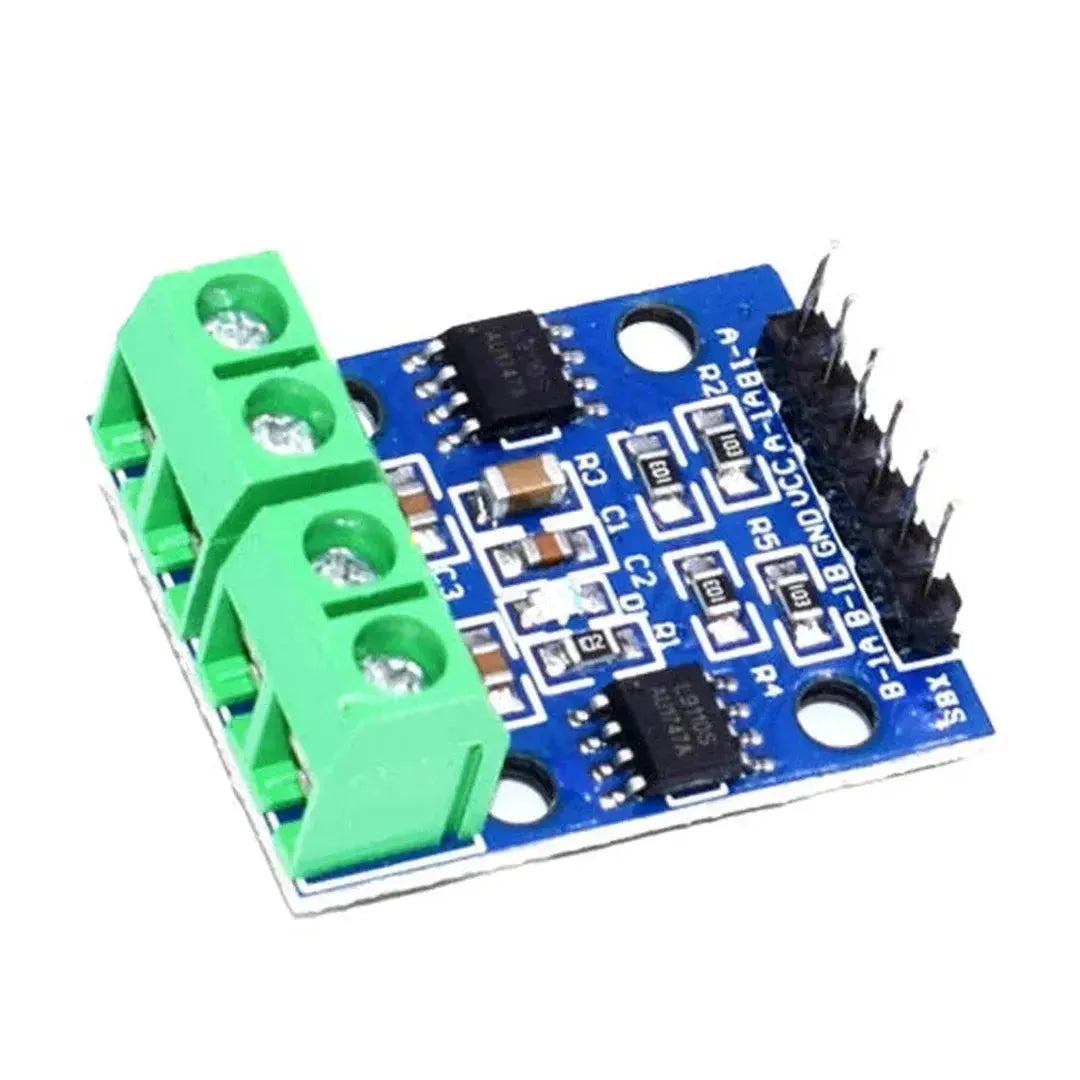
L'L9110S è un IC del driver del motore a doppio canale progettato per controllare la velocità e la direzione di due motori CC o un motore passo-passo. Funziona su un intervallo di tensione da 2,5 V a 12 V, rendendolo versatile per varie applicazioni. L'L9110 è noto per le sue dimensioni compatte, il basso consumo di energia e la facilità di integrazione con i microcontrollori come l'Arduino.
Perché scegliere gli L9110?
- Design compatto: La sua impronta ridotta lo rende ideale per i progetti con spazio limitato.
- Dual Canali: Controlla due motori in modo indipendente, consentendo movimenti complessi.
- Facile da usare: Interfaccia semplice con etichettatura chiara per connessioni facili.
- Conveniente: Prezzi economici senza compromettere la funzionalità.
Collegamento degli L9110 ad Arduino
La configurazione degli L9110 con un Arduino è semplice. Di seguito è riportata una guida passo-passo per creare le connessioni:
-
Connessioni di alimentazione:
- Collegare il
VCCPin degli L9110 sul pin 5V sull'Arduino. - Collegare il
GNDPin degli L9110 sul perno GND sull'Arduino.
- Collegare il
-
Collegamenti del motore:
- Collegare il primo motore al file
OUT1EOUT2pin. - Se si utilizza un secondo motore, collegalo a
OUT3EOUT4pin.
- Collegare il primo motore al file
-
Pin di controllo:
- Collegare il
AIN1EAIN2Pin a due pin digitali sull'Arduino (ad es. Pin 2 e 3). - Se si utilizza un secondo motore, connettiti
BIN1EBIN2ad altri due pin digitali (ad es. Pin 4 e 5).
- Collegare il
Fare riferimento al diagramma seguente per una rappresentazione visiva delle connessioni:

Programmazione dell'Arduino
Dopo aver impostato l'hardware, il passo successivo è programmare l'Arduino per controllare i motori. Di seguito è riportato un codice di esempio che dimostra come controllare la direzione e la velocità di un motore a CC utilizzando il driver del motore L9110.
// Define motor control pins
const int AIN1 = 2;
const int AIN2 = 3;
// Setup function
void setup() {
// Initialize the motor control pins as outputs
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
}
// Loop function
void loop() {
// Rotate motor forward
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
// Rotate motor backward
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
}
Spiegazione:
-
AIN1EAIN2sono usati per controllare la direzione del motore. - Collocamento
AIN1Alto eAIN2Basso ruota il motore in avanti. - Collocamento
AIN1Basso eAIN2Alto ruota il motore all'indietro. - Impostazione di entrambi
AIN1EAIN2Basso ferma il motore.
Velocità di controllo con PWM
L9110s supporta PWM (modulazione della larghezza dell'impulso) per il controllo della velocità. Variando il ciclo di lavoro del segnale PWM, è possibile regolare la velocità del motore. Ecco come modificare il codice precedente per includere il controllo della velocità:
// Define motor control pins
const int AIN1 = 2;
const int AIN2 = 3;
const int PWM_PIN = 9; // PWM pin for speed control
// Setup function
void setup() {
// Initialize the motor control pins as outputs
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(PWM_PIN, OUTPUT);
}
// Loop function
void loop() {
// Set speed to 150 out of 255
analogWrite(PWM_PIN, 150);
// Rotate motor forward
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
// Rotate motor backward
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000); // Stop for 1 second
}
Spiegazione: IL analogWrite() La funzione invia un segnale PWM al motore, permettendo di controllare la sua velocità. Il valore varia da 0 (stop) a 255 (piena velocità).
Applicazioni di L9110 con Arduino
La combinazione del driver a motore L9110 e Arduino apre una vasta gamma di possibilità di progetto:
- Robotica: Controlla il movimento di bracci robotici o robot mobili con un controllo del motore preciso.
- Sistemi di automazione: Automatizzare attività come le porte di apertura/chiusura, le valvole di regolazione o i componenti di spostamento nelle linee di montaggio.
- Progetti fai -da -te: Creare progetti elettronici personalizzati come cursori di telecamere motorizzate, sistemi di irrigazione automatica degli impianti o veicoli a telecomando.
- Strumenti educativi: Insegna agli studenti il controllo motorio, l'elettronica e la programmazione attraverso progetti pratici.
Conclusione
Il driver del motore L9110S è un componente versatile e intuitivo per chiunque cerchi di controllare i motori usando un Arduino. La sua capacità a doppio canale, combinata con semplicità nel cablaggio e nella programmazione, lo rende una scelta eccellente sia per i principianti che per gli hobbisti esperti. Seguendo i passaggi descritti in questo post, è possibile integrare rapidamente il controllo motorio nei progetti ed espandere la funzionalità dei tuoi sistemi a base di Arduino.
Sperimenta diverse velocità del motore, direzioni e applicazioni per sfruttare completamente il potenziale del driver del motore L9110. Felice armeggiare!













































































































































