





Nel regno delle applicazioni automobilistiche e industriali, la comunicazione affidabile tra più microcontrollori è fondamentale. Il protocollo Bus Network Area Network (CAN) è emerso come una soluzione solida per tali esigenze. Questo post sul blog approfondisce i fondamenti del protocollo del bus CAN e dimostra come integrare il controller MCP2515 con un Arduino, consentendo una comunicazione senza soluzione di continuità nei tuoi progetti.
Cos'è il protocollo del bus?
Il bus della rete di area controller (CAN) è uno standard di autobus per veicoli robusto progettato per consentire ai microcontrollori e ai dispositivi di comunicare tra loro senza un computer host. Sviluppato da Bosch negli anni '80, CAN Bus è diventato uno standard nei sistemi automobilistici, ma è anche ampiamente utilizzato nell'automazione industriale e in altri sistemi incorporati.
Le caratteristiche chiave del protocollo del bus CAN includono:
- Configurazione multi-master: Più nodi possono comunicare sullo stesso bus senza un controller centrale.
- Priorizzazione al messaggio: I messaggi sono prioritari in base al loro identificatore, garantendo prima la trasmissione di dati critici.
- Rilevamento degli errori: Robusti meccanismi di rilevamento degli errori, inclusi controlli CRC e bit di riconoscimento, migliorano l'affidabilità.
- Comunicazione ad alta velocità: Supporta velocità dati fino a 1 Mbps, adatte per applicazioni in tempo reale.
Queste caratteristiche rendono il bus CAN ideale per scenari in cui più dispositivi devono comunicare in modo efficiente e affidabile, come nei sistemi di gestione dei motori dei veicoli, nell'automazione industriale e nella robotica.
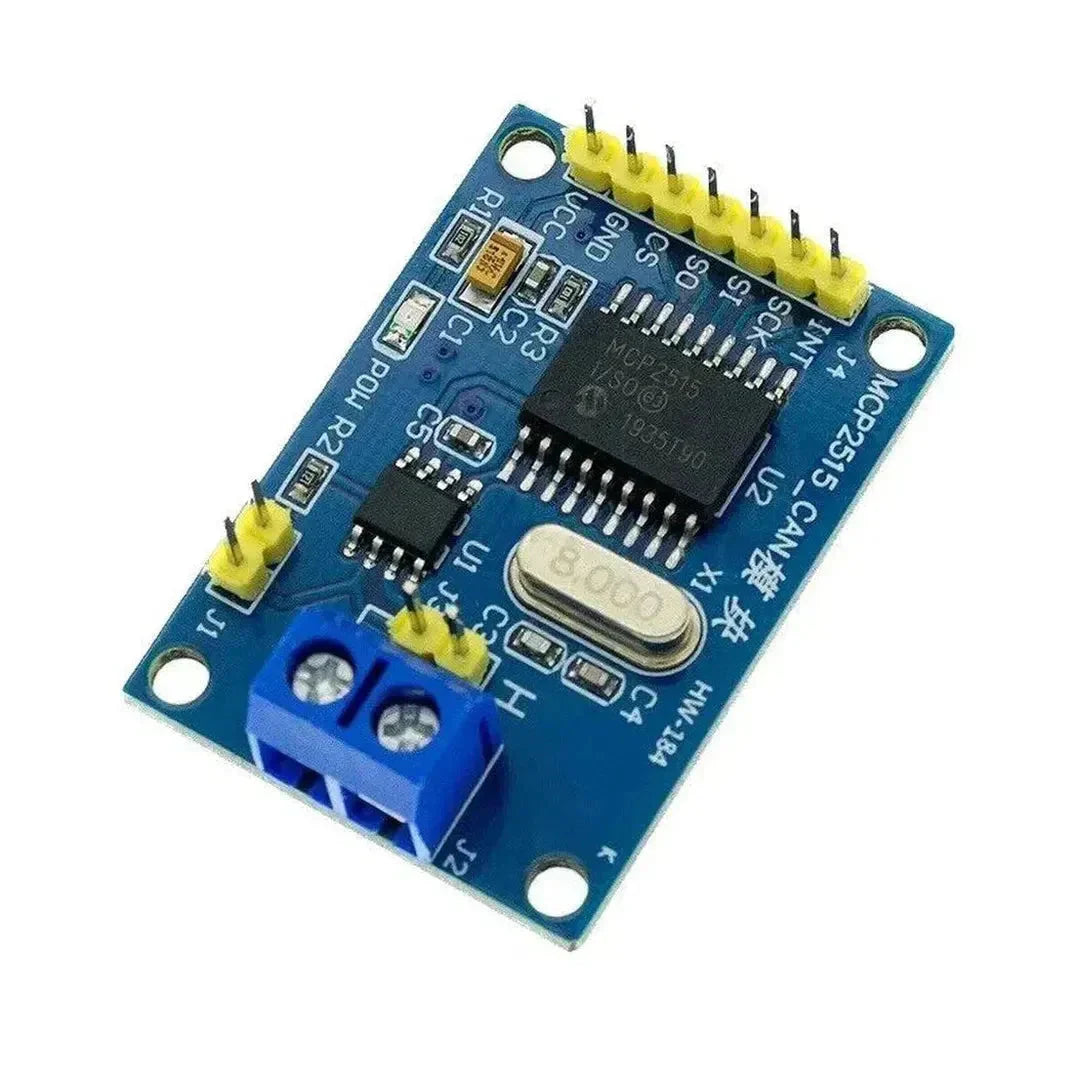
Presentazione del controller CAN MCP2515
L'MCP2515 è un controller di rete (CAN) della rete di controller autonomo che si interfaccia con i microcontrollori tramite l'interfaccia periferica seriale (SPI). Gestisce il protocollo CAN intricato, consentendo agli sviluppatori di concentrarsi sulla logica dell'applicazione di livello superiore. Le caratteristiche chiave di MCP2515 includono:
- Supporto per telai standard e estesi.
- Meccanismi di gestione e filtraggio degli errori integrati.
- Compatibilità con vari microcontrollori, tra cui Arduino.
- Basso consumo energetico, rendendolo adatto per sistemi incorporati.
Integrando MCP2515 con un Arduino, è possibile aggiungere funzionalità di bus CAN ai tuoi progetti, consentendo la comunicazione con altri dispositivi o reti abilitati per lattine.
Impostazione dell'MCP2515 con Arduino
Per iniziare, avrai bisogno dei seguenti componenti:
- Arduino Board (ad es. Arduino Uno)
- MCP2515 Can Modulo (spesso viene fornito con un ricetrasmettitore Can TJA1050)
- Fili jumper
- Breadboard (opzionale)
Ecco una guida passo-passo per impostare MCP2515 con il tuo Arduino:
1. Cablaggio dell'MCP2515 ad Arduino
Collegare il modulo MCP2515 all'Arduino come segue:
- VCC A 5v su Arduino
- GND A GND su Arduino
- Cs A Pin 10 su Arduino
- SCK A Pin 13 su Arduino
- Si (MOSS) a Pin 11 su Arduino
- COSÌ (Miso) a Pin 12 su Arduino
- Int A Pin 2 su Arduino
Arduino MCP2515
------- -------
5V ------> VCC
GND ------> GND
Pin 10 ------> CS
Pin 13 ------> SCK
Pin 11 ------> SI (MOSI)
Pin 12 ------> SO (MISO)
Pin 2 ------> INT
2. Installazione delle librerie richieste
Per comunicare con MCP2515, avrai bisogno del MCP_CAN biblioteca. Installalo tramite il gestore della libreria Arduino:
- Apri l'IDE Arduino.
- Navigare a Sketch> Includi libreria> Gestisci le biblioteche ...
- Cercare MCP_CAN e installa il MCP_CAN Biblioteca di Cory J. Fowler.
3. Caricamento del codice di esempio
Ecco un esempio di base per inviare e ricevere messaggi CAN utilizzando MCP2515 e Arduino:
Invio di un messaggio CAN
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
byte data[] = {0x00, 0xFF, 0xAA, 0x55, 0x33, 0x66, 0x99, 0xCC};
// Send data: CAN ID = 0x100, data length = 8
if (CAN0.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully!");
} else {
Serial.println("Error Sending Message...");
}
delay(1000);
}
Ricevere un messaggio CAN
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
unsigned long canId;
byte len = 0;
byte buf[8];
// Check if data has been received
if (CAN0.checkReceive() == CAN_MSGAVAIL) {
CAN0.readMsgBuf(&canId, &len, buf);
Serial.print("CAN ID: 0x");
Serial.println(canId, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
Nello schizzo di invio, l'Arduino trasmette un messaggio CAN con ID 0x100 ogni secondo. Lo schizzo di ricezione ascolta per i messaggi in arrivo e stampa l'ID e i dati sul monitor seriale.
Applicazioni del bus Can con Arduino
L'integrazione del bus CAN con Arduino apre una moltitudine di applicazioni oltre i sistemi automobilistici. Alcuni casi d'uso popolari includono:
- Robotica: Abilita la comunicazione tra più controller motori e sensori.
- Automazione industriale: Facilitare lo scambio di dati tra diversi macchinari e unità di controllo.
- Automazione domestica: Collegare vari dispositivi intelligenti all'interno di una rete unificata.
- Sistemi di acquisizione dei dati: Raccogliere ed elaborare i dati da più sensori in modo efficiente.
Conclusione
Il protocollo del bus CAN, con la sua affidabilità ed efficienza, funge da spina dorsale per la comunicazione in numerosi sistemi incorporati. Utilizzando il controller CAN MCP2515 con un Arduino, gli sviluppatori possono integrare senza sforzo le capacità degli autobus nei loro progetti. Sia che tu stia lavorando su sistemi automobilistici, automazione industriale o robotica complessa, la comprensione e la leva finanziaria possono migliorare significativamente il quadro di comunicazione del sistema.
Con le guide e gli esempi completi forniti, sei ben attrezzato per intraprendere l'integrazione del bus CAN nel tuo prossimo progetto Arduino. Codice felice!

















































































































































