
IL VL53L0X è un sensore di tempo di volo (TOF) che misura le distanze utilizzando accuratamente la tecnologia laser. È comunemente usato nelle applicazioni di rilevamento di robotica, automazione e ostacoli. Questa guida ti guiderà attraverso l'impostazione e l'utilizzo di VL53L0X con un Raspberry Pi.
Cosa avrai bisogno
- Raspberry Pi (Qualsiasi modello con supporto GPIO, ad esempio PI 3, PI 4)
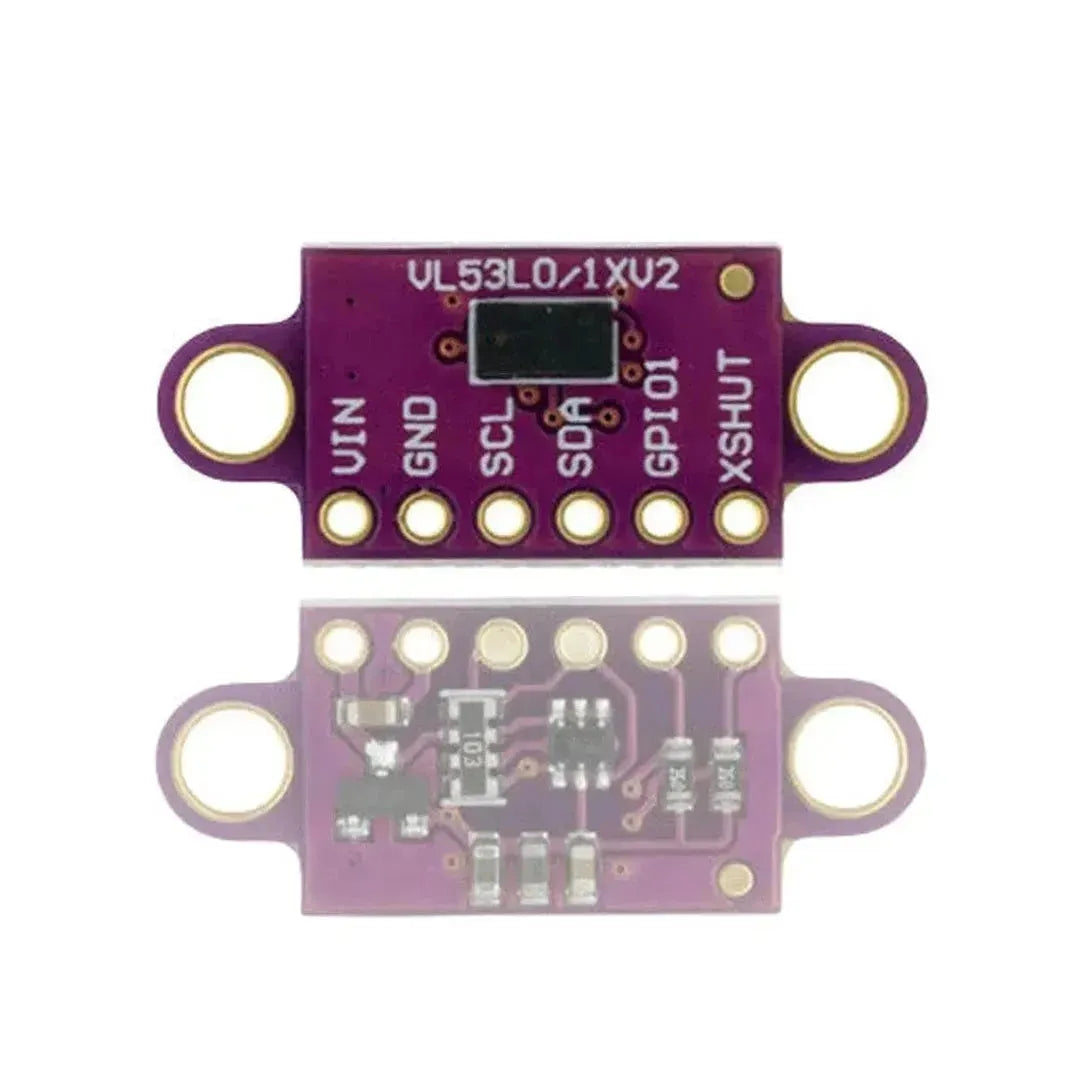
- Modulo sensore a distanza VL53L0X
- Breadboard e fili jumper
- Python installato Sul Raspberry Pi
Passaggio 1: Cablaggio VL53L0X su Raspberry Pi
IL VL53L0X comunica tramite I2C, quindi dobbiamo collegarlo ai pin i2c di Raspberry Pi.
Connessioni
| PIN VL53L0X | Pin di lampone |
|---|---|
| VCC | 3.3V (pin 1) |
| GND | Terra (pin 6) |
| SDA | SDA (PIN 3, GPIO2) |
| SCL | SCL (PIN 5, GPIO3) |
| Xshut (opzionale) | Qualsiasi GPIO (per abilitare/disabilitare il sensore) |
Passaggio 2: abilita i2c su Raspberry Pi
Poiché il VL53L0X comunica su I2C, dobbiamo abilitare l'interfaccia I2C.
-
Apri lo strumento di configurazione Raspberry Pi:
sudo raspi-config -
Navigare a Opzioni di interfaccia> i2c e abilitarlo.
-
Riavvia il Raspberry Pi:
sudo reboot -
Verificare che il sensore venga rilevato in esecuzione:
sudo i2cdetect -y 1Il VL53L0X dovrebbe apparire a 0x29.
Passaggio 3: installa le librerie richieste
- Aggiorna l'elenco dei pacchetti di Raspberry Pi:
sudo apt update && sudo apt upgrade -y - Installa le librerie Python necessarie:
sudo apt install -y python3-pip i2c-tools python3-smbus pip3 install adafruit-circuitpython-vl53l0x
Passaggio 4: lettura dei dati della distanza dal VL53L0X
Ecco uno script Python per misurare le distanze usando il sensore VL53L0X.
Esempio di codice Python
import time
import board
import busio
import adafruit_vl53l0x
# Initialize I2C and VL53L0X sensor
i2c = busio.I2C(board.SCL, board.SDA)
vl53 = adafruit_vl53l0x.VL53L0X(i2c)
try:
while True:
distance = vl53.range # Read distance in millimeters
print(f"Distance: {distance} mm")
time.sleep(1)
except KeyboardInterrupt:
print("Exiting...")
Passaggio 5: applicazioni del VL53L0X
- Rilevamento degli ostacoli - Utilizzare in robotica e veicoli autonomi per rilevare oggetti.
- Rilevamento di prossimità - Automatizzare le porte, i sistemi di sicurezza o le applicazioni IoT.
- Misurazione del livello - Monitorare il livello di liquido in un contenitore.
- Riconoscimento dei gesti - Traccia i movimenti delle mani per interfacce touchless.
Risoluzione dei problemi
-
Dispositivo non rilevato (
i2cdetectnon mostra0x29)- Controlla il cablaggio di SDA/SCL pin.
- Assicurarsi che l'interfaccia I2C sia abilitata su Raspberry Pi.
-
Letture imprecise
- Assicurarsi che il sensore non sia ostruito.
- Evita superfici riflettenti che possono causare letture errate.
-
Sensori VL53L0X multipli
- Usare il Xshut PIN per assegnare diversi indirizzi I2C a più sensori VL53L0X.
Conclusione
Il VL53L0X è un potente Sensore di distanza basato sul laser Ciò si integra perfettamente con il Raspberry Pi. Seguendo questa guida, è possibile misurare accuratamente le distanze per i progetti di robotica, automazione e IoT. Sperimenta con diverse applicazioni per sbloccare il suo pieno potenziale! 🚀

















































































































































