





MCP2515は、自動車および産業コミュニケーションに広く使用されている缶(コントローラーエリアネットワーク)バスモジュールです。 Arduinoは、CANベースのシステムとインターフェイスして、データを効率的に送信および受信できるようになります。このチュートリアルでは、Arduinoを使用してMCP2515モジュールのセットアップと使用をガイドします。
あなたが必要とするもの
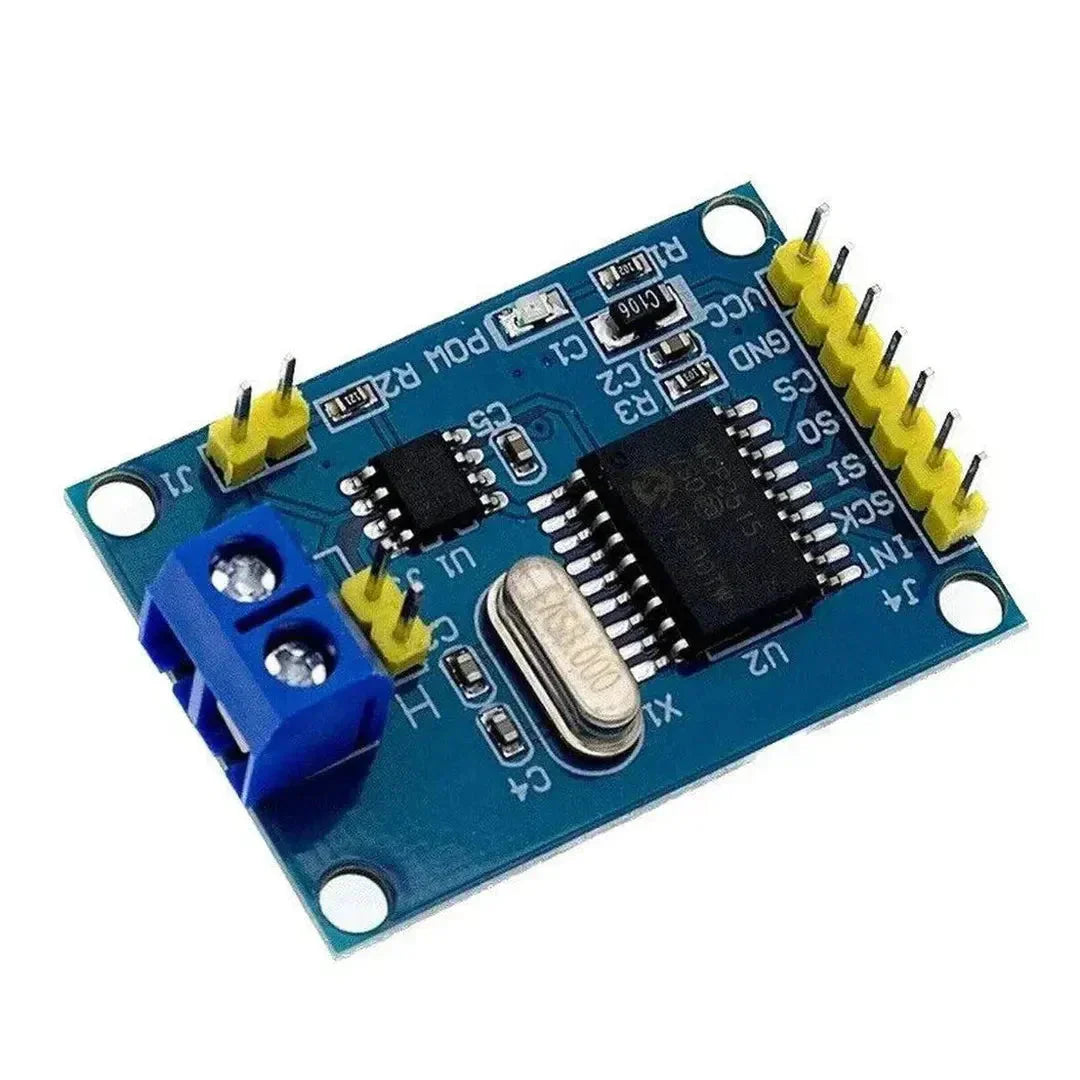
- MCP2515 CAN BUSモジュール
- Arduino委員会(例:UNO、MEGA、NANO)
- CAN-BUS互換性のあるデバイスまたは別のMCP2515モジュール
- ジャンパーワイヤ
- ブレッドボード(オプション)
- Arduino IDEがインストールされたコンピューター
ステップ1:MCP2515モジュールの理解
MCP2515モジュールでは、MCP2515 CAN CONTROLLER ICおよびTJA1050 CAN Transceiverを使用します。モジュールは、SPIインターフェイスを介してArduinoと通信します。
MCP2515ピンアウト
| ピン | 関数 |
|---|---|
| VCC | 電源(5V) |
| GND | 地面 |
| CS | チップ選択 |
| それで | SPIデータ出力 |
| si | SPIデータ入力 |
| SCK | SPIクロック |
| int | 割り込み出力 |
ステップ2:MCP2515をArduinoに配線します
以下は、MCP2515モジュールをArduino UNOに接続するための配線ガイドです。
| MCP2515ピン | Arduino Pin |
|---|---|
| VCC | 5V |
| GND | GND |
| CS | ピン10 |
| それで | ピン12 |
| si | ピン11 |
| SCK | ピン13 |
| int | ピン2 |
注記: 他のArduinoボードの場合、SPIピンが特定のボードのピンアウトに対応していることを確認してください。
ステップ3:必要なライブラリをインストールします
MCP_CAN ライブラリは、MCP2515モジュールとの相互作用を簡素化します。
MCP_CANライブラリをインストールする手順:
- Arduino IDEを開きます。
- 行きます スケッチ > ライブラリを含めます > ライブラリを管理します.
- ライブラリマネージャーで「MCP_CAN」を検索します。
- クリック インストール.
ステップ4:コードをアップロードします
トランスミッターコード(缶バスのデータの送信):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
if (CAN.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully");
} else {
Serial.println("Error Sending Message");
}
delay(1000); // Send data every second
}
レシーバーコード(缶バスからデータを読む):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char len = 0;
unsigned char buf[8];
if (CAN.checkReceive() == CAN_MSGAVAIL) {
CAN.readMsgBuf(&len, buf);
unsigned long id = CAN.getCanId();
Serial.print("Message ID: 0x");
Serial.println(id, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
ステップ5:セットアップをテストします
- ステップ2で説明されているように、MCP2515モジュールをArduinoに接続します。
- Transmitterコードを1つのArduinoにアップロードし、レシーバーコードを別のArduinoにアップロードします。
- 両方のMCP2515モジュールのCAN_HおよびCAN_Lピンを接続して、缶バスを確立します。
- Arduinosの両方でシリアルモニターを開き、ボーレートをに設定します
115200. - レシーバーArduinoでは、Transmitter Arduinoから送信されたメッセージが表示されます。
トラブルシューティング
- 受信したデータはありません: モジュール間のCAN_HおよびCAN_L接続を確認します。
- 初期化に失敗しました: SPI接続とCSピンがセットアップと一致するようにします。
- 不安定なコミュニケーション: 両方のモジュールが同じボーレート(この例では500 kbps)を使用していることを確認します。
MCP2515 CANバスモジュールのアプリケーション
- 車両診断(OBD-II)
- 産業自動化システム
- ロボット通信
- 缶のネットワークを備えたIoTデバイス
結論
データを送信および受信するために、Arduinoを備えたMCP2515 CANバスモジュールを正常にセットアップしました。このモジュールは、缶バスを介して信頼できる通信を必要とするアプリケーションにとって非常に用途が広いです。さまざまなメッセージIDとデータペイロードを試して、その最大限の可能性を調査してください!



































































































































