





MCP2515は、Raspberry PIデバイスが缶に対応できるシステムと通信できる人気のある缶(コントローラーエリアネットワーク)コントローラーモジュールです。これにより、自動車プロジェクト、産業自動化、IoTアプリケーションに最適です。このガイドでは、Raspberry PiでMCP2515をセットアップして使用する方法について説明します。
あなたが必要とするもの
- Raspberry Pi (GPIOサポートを備えたモデル、例えばPI 3、PI 4)
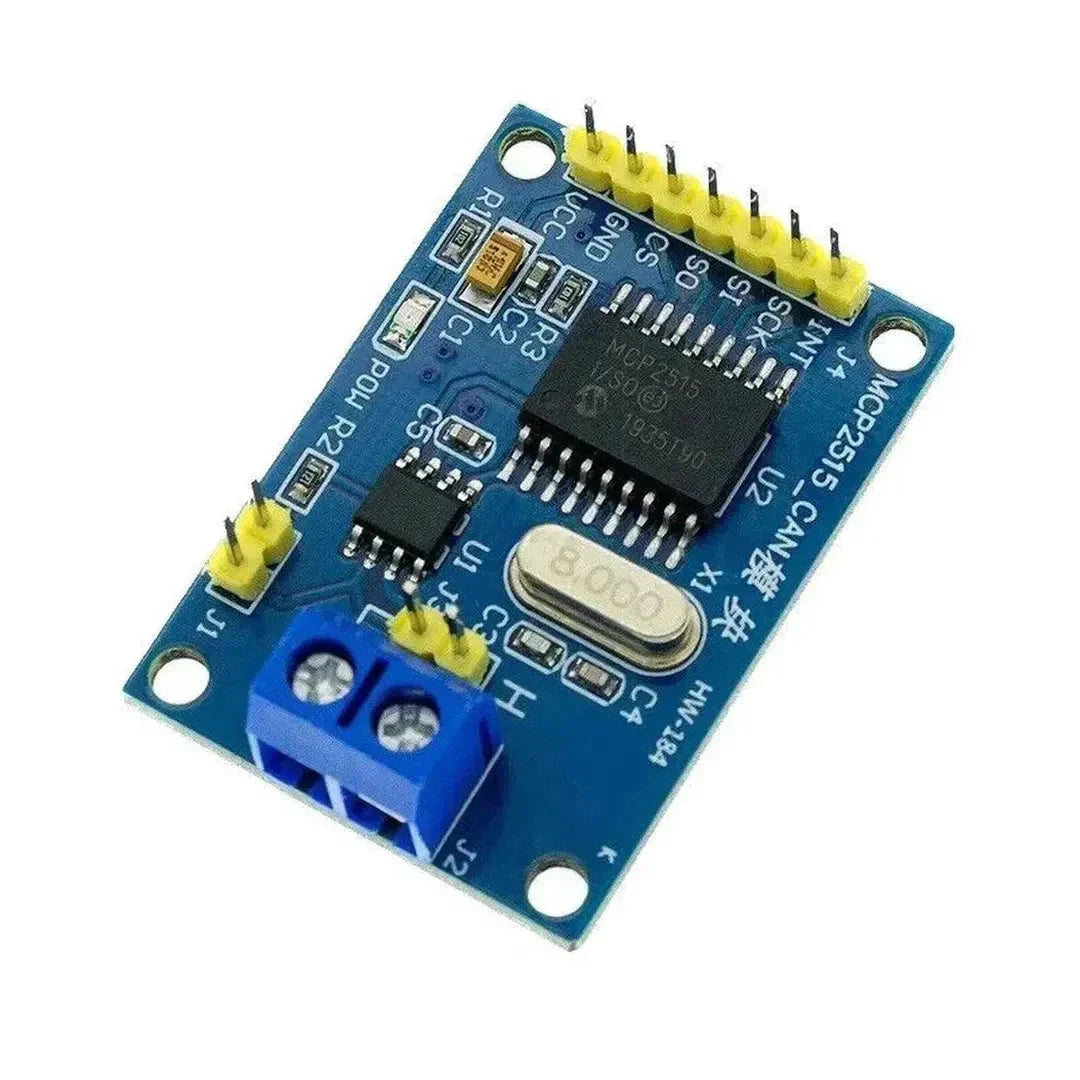
- MCP2515 CANモジュール
- ブレッドボードとジャンパーワイヤ
- Raspberry Piまたは接続されたキーボードとモニターへのSSHアクセスを備えたコンピューター
- Raspberry PiにインストールされたPython
- トランシーバーモジュール(MCP2515に含まれていない場合)
ステップ1:MCP2515をRaspberry Piに配線します
MCP2515は、SPIプロトコルを使用してRaspberry PIと通信します。
接続(SPIモード)
| MCP2515ピン | ラズベリーPIピン |
|---|---|
| VCC | 3.3V(ピン1) |
| GND | グラウンド(ピン6) |
| CS | GPIO8(ピン24、SPI0_CE0) |
| それで | GPIO9(ピン21、SPI0_MISO) |
| si | gpio10(ピン19、spi0_mosi) |
| SCK | GPIO11(ピン23、SPI0_SCLK) |
| int | GPIO25(ピン22) |
ステップ2:RaspberryPiでSPIインターフェイスを有効にします
- Raspberry Pi構成ツールを開きます。
sudo raspi-config - に移動します インターフェイスオプション> SPI そしてそれを有効にします。
- RaspberryPiを再起動します:
sudo reboot
ステップ3:必要なライブラリとツールをインストールします
- RaspberryPiを更新します:
sudo apt update && sudo apt upgrade -y - インストールします
can-utilsCANコミュニケーションのパッケージ:sudo apt install -y can-utils
ステップ4:CANインターフェイスを構成します
-
開きます
/boot/config.txtfile:sudo nano /boot/config.txt -
次の行を追加して、MCP2515オーバーレイを有効にします。
dtoverlay=mcp2515-can0,oscillator=16000000,interrupt=25 dtoverlay=spi-bcm2835保存して終了します。
-
RaspberryPiを再起動します:
sudo reboot -
缶インターフェイスを作成します:
sudo ip link set can0 up type can bitrate 500000 -
缶インターフェイスを確認します。
ifconfig can0
ステップ5:MCP2515のテスト
-
缶のメッセージを送信します: を使用します
cansendテストメッセージを送信するコマンド:cansend can0 123#DEADBEEF -
缶のメッセージを受信します: を使用します
candump着信メッセージを監視するコマンド:candump can0
ステップ6:Pythonを使用してMCP2515と通信します
インストールします python-can Python経由で缶を送信および受信するライブラリ。
インストール
pip install python-can
例Pythonスクリプト
import can
# Create a CAN bus instance
bus = can.interface.Bus(channel='can0', bustype='socketcan')
# Send a CAN message
msg = can.Message(arbitration_id=0x123, data=[0xDE, 0xAD, 0xBE, 0xEF], is_extended_id=False)
bus.send(msg)
print("Message sent: ", msg)
# Receive a CAN message
print("Waiting for a message...")
message = bus.recv()
print("Received message: ", message)
トラブルシューティング
-
インターフェイスが見つかりません:
- SPIインターフェイスが有効になっていることを確認します。
- Raspberry PiとMCP2515の間の配線を確認してください。
- を確保します
/boot/config.txtファイルが正しく構成されています。
-
メッセージはありません:
- 缶バスが120オーム抵抗で適切に終了していることを確認します。
- 缶バスのすべてのデバイスでビットレートが一致することを確認します。
-
Pythonエラー:
- を確保します
python-canライブラリがインストールされています。 - タイプミスまたは構成エラーについては、Pythonスクリプトを確認してください。
- を確保します
MCP2515のアプリケーション
- 自動車診断と監視
- 産業自動化システム
- ロボット通信ネットワーク
- 信頼できる通信プロトコルを必要とするIoTプロジェクト
結論
MCP2515 Can Controllerモジュールは、Raspberry PIに堅牢な通信機能を追加し、自動車、産業、IoTのアプリケーションに最適です。このガイドに従うことにより、MCP2515を設定してテストし、CANプロトコルを活用する強力なプロジェクトの構築を開始できます。



































































































































