
VL53L0Xは、ミリメートルの精度で最大2メートルの距離を測定できるコンパクトで正確な時間(TOF)距離センサーです。レーザーを使用して、光がオブジェクトに移動して背中に移動するのにかかる時間を測定し、ロボット工学、近接センシング、障害物の検出に最適です。このチュートリアルでは、vl53l0xをArduinoとインターフェースすることをガイドします。
あなたが必要とするもの
- VL53L0X距離センサーモジュール
- Arduino委員会(例:UNO、MEGA、NANO)
- ブレッドボードとジャンパーワイヤ
- Arduino IDEがインストールされたコンピューター
ステップ1:VL53L0Xセンサーの理解
VL53L0XはI2Cプロトコルを使用して通信し、Arduinoに簡単に接続できます。特徴:
- I2Cインターフェイス: SDAおよびSCLラインを使用します。
- 範囲の機能: 数ミリメートルから2メートルの距離を測定します。
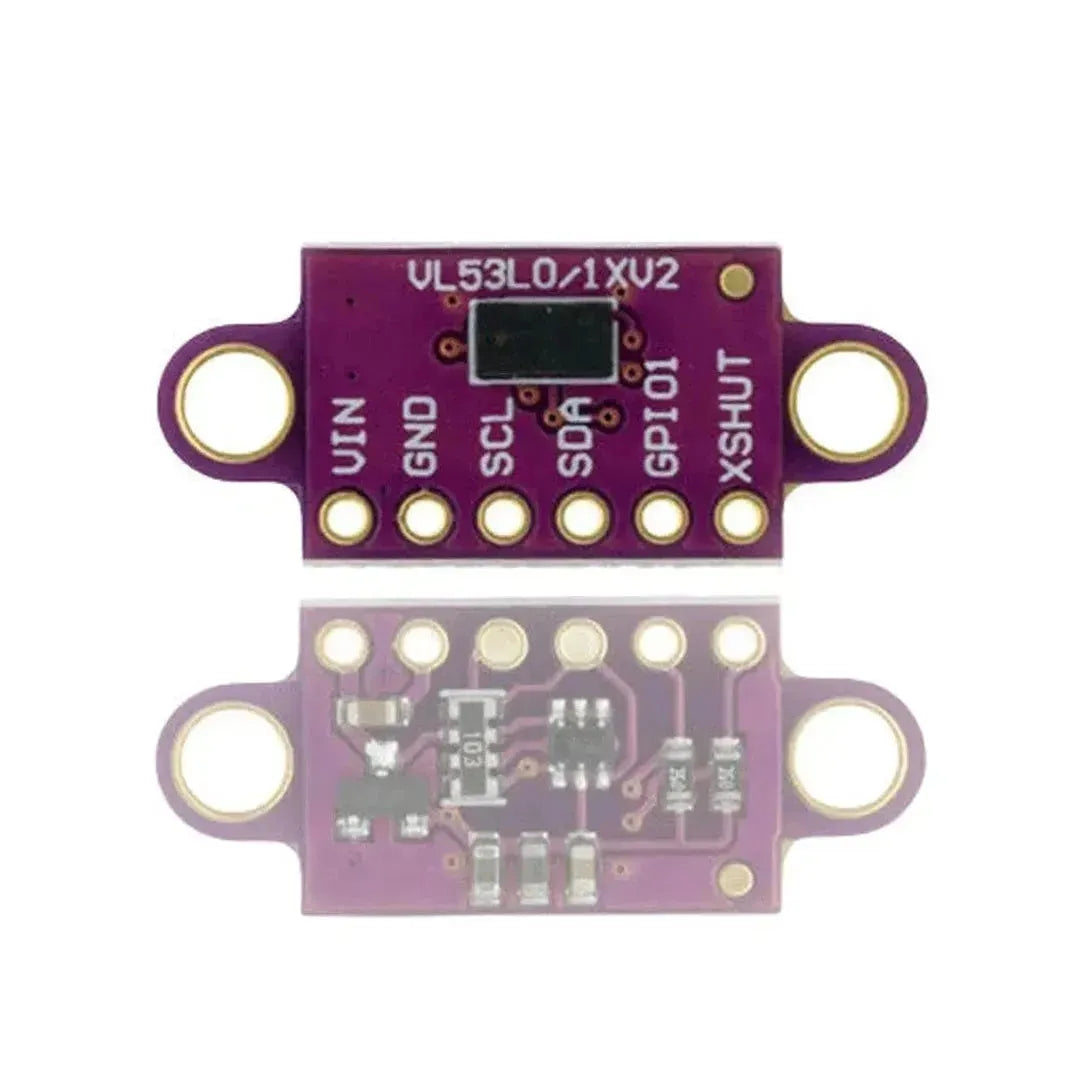
VL53L0Xピンアウト
| ピン | 関数 |
|---|---|
| ヴィン | 電源(3.3V/5V) |
| GND | 地面 |
| SDA | I2Cデータライン |
| SCL | I2Cクロックライン |
| xshut | シャットダウン入力(オプション) |
| GPIO1 | 割り込み(オプション) |
ステップ2:VL53L0XをArduinoに配線します
次のように、VL53L0XをArduinoに接続します。
| VL53L0Xピン | Arduino Pin |
|---|---|
| ヴィン | 5V |
| GND | GND |
| SDA | A4(SDA) |
| SCL | A5(SCL) |
注記: Arduino Megaまたはその他のボードを使用している場合は、I2Cピンアウトを確認してください。
ステップ3:VL53L0Xライブラリをインストールします
Adafruit VL53L0Xライブラリは、センサーとの相互作用を簡素化します。
インストールする手順:
- Arduino IDEを開きます。
- 行きます スケッチ > ライブラリを含めます > ライブラリを管理します.
- 「Adafruit VL53L0X」を検索してクリックします インストール.
ステップ4:コードをアップロードします
VL53L0Xから距離測定値を読むためのスケッチの例を次に示します。
#include <Wire.h>
#include <Adafruit_VL53L0X.h>
Adafruit_VL53L0X lox = Adafruit_VL53L0X();
void setup() {
Serial.begin(9600);
while (!Serial) {
delay(1); // Wait for Serial Monitor to open
}
Serial.println("Adafruit VL53L0X Test");
if (!lox.begin()) {
Serial.println("Failed to find VL53L0X sensor! Check wiring.");
while (1);
}
Serial.println("VL53L0X sensor initialized.");
}
void loop() {
VL53L0X_RangingMeasurementData_t measure;
lox.rangingTest(&measure, false); // Perform a ranging test
if (measure.RangeStatus != 4) { // Check if valid
Serial.print("Distance (mm): ");
Serial.println(measure.RangeMilliMeter);
} else {
Serial.println("Out of range");
}
delay(100); // Wait before the next measurement
}
ステップ5:セットアップをテストします
- USBを介してArduinoをコンピューターに接続します。
- Arduino IDEを開き、正しいものを選択します ボード そして ポート の下 ツール メニュー。
- クリックしてコードをArduinoにアップロードします アップロード.
- シリアルモニターを開きます(ツール > シリアルモニター)そして、ボーレートをに設定します
9600. - オブジェクトにVL53L0Xセンサーをポイントします。シリアルモニターにミリメートル単位の距離が表示されます。
オプション:複数のVL53L0Xセンサーを使用します
同じI2Cバスで複数のVL53L0Xセンサーを使用するには、I2Cアドレスを使用して変更する必要があります。 XSHUT ピン:
- を引っ張ります
XSHUT1つのセンサーのピンが低く、無効になります。 - アクティブセンサーを初期化し、I2Cアドレスを変更します。
- 追加のセンサーのために繰り返します。
I2Cアドレスを変更するための例:
lox.setAddress(0x31); // Set a new I2C address (default is 0x29)
VL53L0Xのアプリケーション
- ロボットの障害物検出
- スマートデバイス用の近接センサー
- 自動照明制御
- ドローン着陸システム
トラブルシューティング
- センサーからの応答はありません: 配線を再確認し、センサーが駆動されていることを確認します。
- 範囲外の測定値: ターゲットオブジェクトがセンサーの有効範囲内(最大2m)内にあることを確認します。
-
複数のセンサー干渉: を使用します
XSHUT一意のi2cアドレスを割り当てるためのピン。
結論
Arduinoを使用して、VL53L0X飛行時間距離センサーを正常にセットアップしました。その精度とコンパクトサイズは、さまざまなプロジェクトの多用途ツールになります。この強力なセンサーを最大限に活用するために、ロボットやスマートホームシステムなどのさまざまなアプリケーションを試してください!



































































































































