





自動車および産業用アプリケーションの領域では、複数のマイクロコントローラー間の信頼できる通信が最重要です。コントローラーエリアネットワーク(CAN)バスプロトコルは、このようなニーズの堅牢なソリューションとして浮上しています。このブログ投稿は、CANバスプロトコルの基礎を掘り下げ、MCP2515 CANコントローラーをArduinoと統合する方法を示し、プロジェクトでシームレスなコミュニケーションを可能にします。
バスプロトコルは何ですか?
コントローラーエリアネットワーク(CAN)バスは、マイクロコントローラーやデバイスがホストコンピューターなしで互いに通信できるように設計された堅牢な車両バス標準です。 1980年代にBoschによって開発されたCan Busは、自動車システムの標準となっていますが、産業用自動化やその他の組み込みシステムでも広く使用されています。
缶バスプロトコルの主要な機能は次のとおりです。
- マルチマスター構成: 複数のノードは、中央コントローラーなしで同じバスで通信できます。
- メッセージの優先順位付け: メッセージは識別子に基づいて優先順位付けされ、重要なデータが最初に送信されるようにします。
- エラー検出: CRCチェックや確認ビットを含む堅牢なエラー検出メカニズムは、信頼性を高めます。
- 高速コミュニケーション: リアルタイムアプリケーションに適した最大1 Mbpsまでのデータレートをサポートします。
これらの機能により、バスは、車両エンジン管理システム、産業自動化、ロボット工学など、複数のデバイスが効率的かつ確実に通信する必要があるシナリオに最適です。
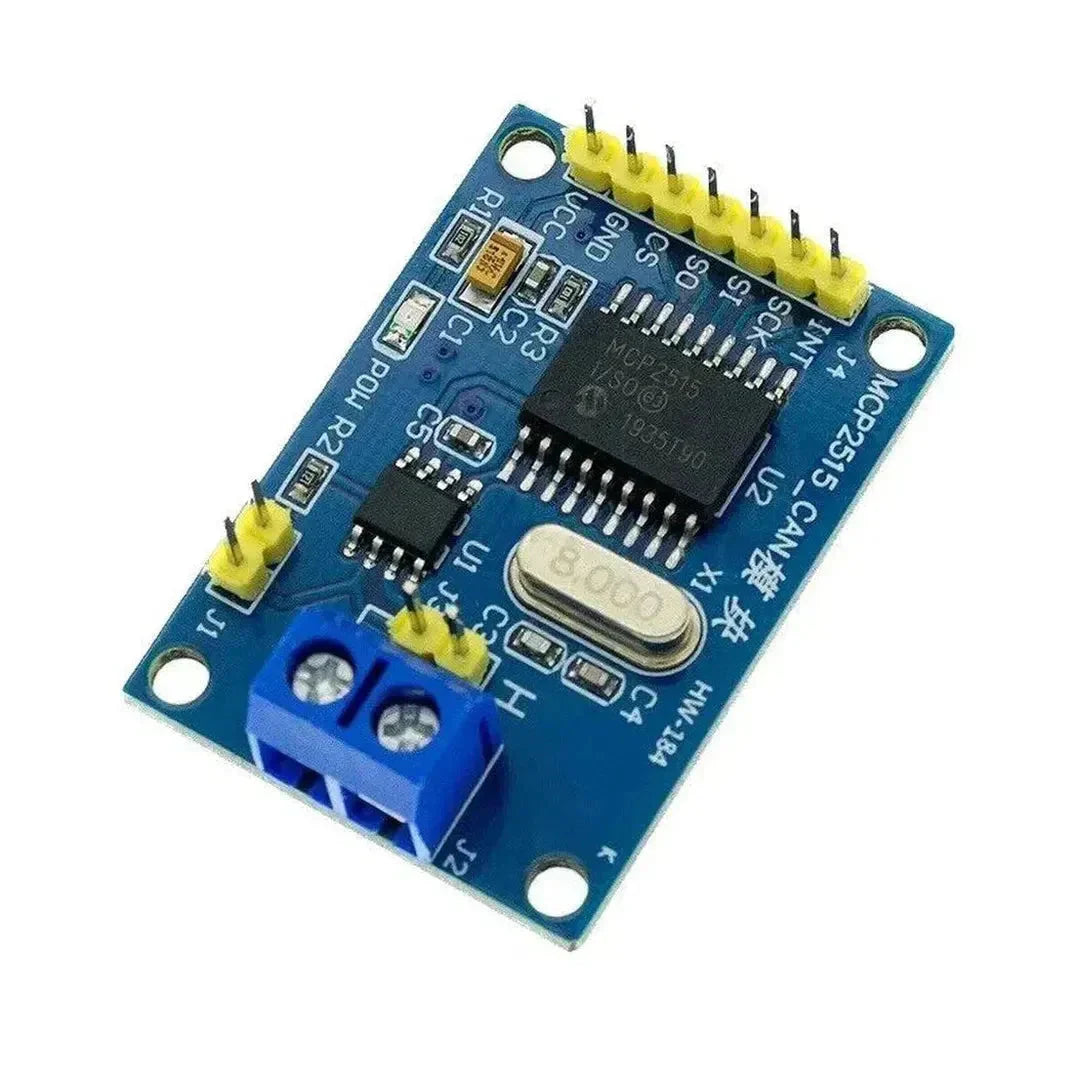
MCP2515 CANコントローラーの導入
MCP2515は、シリアル周辺インターフェイス(SPI)を介してマイクロコントローラーとインターフェイスするスタンドアロンコントローラーエリアネットワーク(CAN)コントローラーです。複雑な缶プロトコルを処理し、開発者が高レベルのアプリケーションロジックに集中できるようにします。 MCP2515の主要な機能は次のとおりです。
- 標準および拡張缶のフレームのサポート。
- 組み込みのエラー処理とフィルタリングメカニズム。
- Arduinoを含むさまざまなマイクロコントローラーとの互換性。
- 低消費電力は、組み込みシステムに適しています。
MCP2515をArduinoと統合することにより、プロジェクトに缶バス機能を追加し、他の缶対応デバイスまたはネットワークとの通信を可能にします。
ArduinoでMCP2515をセットアップします
開始するには、次のコンポーネントが必要です。
- Arduino委員会(例:Arduino Uno)
- MCP2515 CANモジュール(多くの場合、TJA1050 Can Transceiverが付属しています)
- ジャンパーワイヤ
- ブレッドボード(オプション)
Arduinoを使用してMCP2515をセットアップするための段階的なガイドを次に示します。
1。MCP2515をArduinoに配線します
次のように、MCP2515モジュールをArduinoに接続します。
- VCC に 5V Arduinoで
- GND に GND Arduinoで
- CS に ピン10 Arduinoで
- SCK に ピン13 Arduinoで
- si (モシ)へ ピン11 Arduinoで
- それで (味o)へ ピン12 Arduinoで
- int に ピン2 Arduinoで
Arduino MCP2515
------- -------
5V ------> VCC
GND ------> GND
Pin 10 ------> CS
Pin 13 ------> SCK
Pin 11 ------> SI (MOSI)
Pin 12 ------> SO (MISO)
Pin 2 ------> INT
2。必要なライブラリのインストール
MCP2515と通信するには、必要です MCP_CAN 図書館。 Arduino Library Manager経由でインストールしてください。
- Arduino IDEを開きます。
- に移動します スケッチ>ライブラリを含める>ライブラリの管理...
- 検索する MCP_CAN インストールします MCP_CAN Cory J. Fowlerによる図書館。
3。サンプルコードのアップロード
MCP2515とArduinoを使用してCANメッセージを送信および受信するための基本的な例を次に示します。
缶のメッセージを送信します
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
byte data[] = {0x00, 0xFF, 0xAA, 0x55, 0x33, 0x66, 0x99, 0xCC};
// Send data: CAN ID = 0x100, data length = 8
if (CAN0.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully!");
} else {
Serial.println("Error Sending Message...");
}
delay(1000);
}
缶のメッセージを受信します
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
unsigned long canId;
byte len = 0;
byte buf[8];
// Check if data has been received
if (CAN0.checkReceive() == CAN_MSGAVAIL) {
CAN0.readMsgBuf(&canId, &len, buf);
Serial.print("CAN ID: 0x");
Serial.println(canId, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
送信スケッチでは、ArduinoはIDを使用してCANメッセージを送信します 0x100 毎秒。受信スケッチは、着信缶にメッセージを表示し、IDとデータをシリアルモニターに印刷します。
Arduinoを使用した缶バスのアプリケーション
CANバスとArduinoの統合により、自動車システムを超えて多数のアプリケーションが開かれます。一部の一般的なユースケースには次のものがあります。
- ロボット工学: 複数のモーターコントローラーとセンサー間の通信を有効にします。
- 産業自動化: 異なる機械と制御ユニット間のデータ交換を促進します。
- ホームオートメーション: 統一されたネットワーク内のさまざまなスマートデバイスを接続します。
- データ収集システム: 複数のセンサーからデータを効率的に収集および処理します。
結論
信頼性と効率性を備えた缶バスプロトコルは、多数の組み込みシステムでの通信のバックボーンとして機能します。 Arduinoを使用してMCP2515 CANコントローラーを利用することにより、開発者はCANバス機能をプロジェクトに簡単に統合できます。自動車システム、産業自動化、または複雑なロボット工学に取り組んでいるかどうかにかかわらず、理解とレバレッジ缶バスは、システムの通信フレームワークを大幅に強化できます。
包括的なガイドと例が提供されているため、CANバスを次のArduinoプロジェクトに統合することに着手できるように設備が整っています。ハッピーコーディング!

















































































































































