
(日本語) VL53L0X は、レーザー技術を用いて距離を正確に測定するTime-of-Flight (ToF)センサーです。ロボット、オートメーション、障害検出アプリケーションで一般的に使用されます。このガイドでは、Raspberry PiでVL53L0Xを設定して使用します。
あなたが必要とするもの
- ラズベリーパイ (GPIO対応モデル(例:Pi 3、 Pi 4)
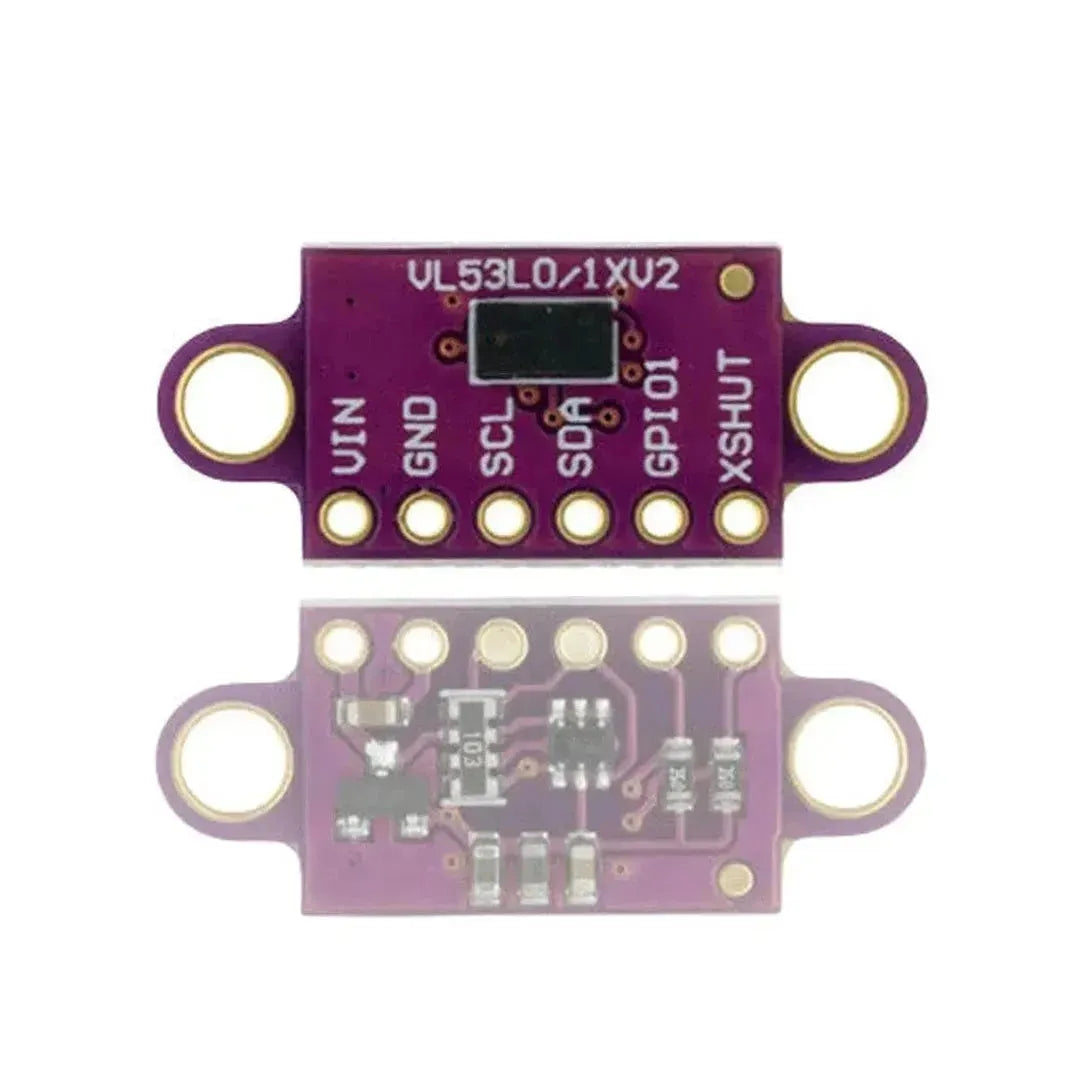
- VL53L0X距離センサーモジュール
- ブレッドボードとジャンパーワイヤー
- インストールされたPython ラズベリーパイに
ステップ1:ラズベリーパイにVL53L0Xを配線する
(日本語) は 経由で通信Raspberry PiのI2Cピンに接続する必要があります。
[接続]
| VL53L0Xピン | ラズベリーピピン |
|---|---|
| VCC | 3.3V(ピン1) |
| GND | グラウンド(ピン6) |
| SDA | SDA(ピン3、 GPIO2) |
| SCL | SCL(ピン5、 GPIO3) |
| XSHUT(任意) | 任意のGPIO(センサーの有効/無効) |
ステップ2: Raspberry PiでI2Cを有効にする
VL53L0XはI2Cで通信するので、I2Cインターフェイスを有効にする必要があります。
-
Raspberry Pi設定ツールを開きます。
sudo raspi-config -
に移動します。 インターフェイスオプション>I2C それを有効にします。
-
Raspberry Piを再起動する:
sudo reboot -
センサーが実行されて検出されていることを確認します。
sudo i2cdetect -y 1VL53L0Xが表示されるはずです 0x29.
ステップ3:必要なライブラリをインストールする
- Raspberry Piのパッケージリストを更新します。
sudo apt update && sudo apt upgrade -y - 必要なPythonライブラリをインストールします。
sudo apt install -y python3-pip i2c-tools python3-smbus pip3 install adafruit-circuitpython-vl53l0x
ステップ4: VL53L0Xからの距離データの読み取り
ここでは、VL53L0Xセンサーを使用して距離を測定するPythonスクリプトです。
Pythonコードの例
import time
import board
import busio
import adafruit_vl53l0x
# Initialize I2C and VL53L0X sensor
i2c = busio.I2C(board.SCL, board.SDA)
vl53 = adafruit_vl53l0x.VL53L0X(i2c)
try:
while True:
distance = vl53.range # Read distance in millimeters
print(f"Distance: {distance} mm")
time.sleep(1)
except KeyboardInterrupt:
print("Exiting...")
ステップ5: VL53L0Xのアプリケーション
- 障害物検出 -オブジェクトを検出するためにロボット工学や自動運転車で使用します。
- 近接センシング -ドア、セキュリティシステム、またはIoTアプリケーションを自動化します。
- レベル測定 -容器の液体のレベルを監視します。
- ジェスチャー認識 -タッチレスインターフェイスのための手の動きを追跡します。
トラブルシューティング
-
デバイスが検出されない(
i2cdetect表示されない0x29)- 配線のチェック SDA/SCL ピン。
- Raspberry PiでI2Cインターフェイスが有効になっていることを確認します。
-
不正確な読み取り
- センサーが妨げられていないことを確認します。
- 誤った読み取りを引き起こす可能性のある反射面は避けてください。
-
複数のVL53L0Xセンサー
- を使用します。 XSHUT 複数のI2Cセンサーに異なるVL53L0Xアドレスを割り当てるピン。
おわりに
VL53L0Xは強力です レーザーベースの距離センサー ラズベリーパイとシームレスに統合します。このガイドに従うことで、ロボット、オートメーション、およびIoTプロジェクトの距離を正確に測定できます。さまざまなアプリケーションを試して、その可能性を最大限に引き出す! 🚀

















































































































































