





Op het gebied van automotive en industriële toepassingen is betrouwbare communicatie tussen meerdere microcontrollers van het grootste belang. Het busprotocol van het controller Area Network (CAN) is naar voren gekomen als een robuuste oplossing voor dergelijke behoeften. Deze blogpost duikt in de basisprincipes van het CAN -busprotocol en laat zien hoe de MCP2515 CAN CAN -controller te integreren met een Arduino, waardoor naadloze communicatie in uw projecten mogelijk wordt.
Wat is het busprotocol?
De Bus van het Controller Area Network (CAN) is een robuuste voertuigbusstandaard die is ontworpen om microcontrollers en apparaten met elkaar te kunnen communiceren zonder een hostcomputer. Canch ontwikkeld door Bosch in de jaren 1980, is CAN BUS een standaard geworden in automobielsystemen, maar wordt ook veel gebruikt in industriële automatisering en andere ingebedde systemen.
Belangrijkste kenmerken van het CAN -busprotocol zijn:
- Multi-master configuratie: Meerdere knooppunten kunnen zonder een centrale controller op dezelfde bus communiceren.
- Berichtprioritering: Berichten worden geprioriteerd op basis van hun ID, waardoor kritieke gegevens eerst worden verzonden.
- Foutdetectie: Robuuste foutdetectiemechanismen, waaronder CRC -controles en erkenningsbits, verbeteren de betrouwbaarheid.
- Snelle communicatie: Ondersteunt gegevenssnelheden tot 1 Mbps, geschikt voor realtime toepassingen.
Deze functies maken kan bus ideaal voor scenario's waarbij meerdere apparaten efficiënt en betrouwbaar moeten communiceren, zoals in voertuigmotorbeheersystemen, industriële automatisering en robotica.
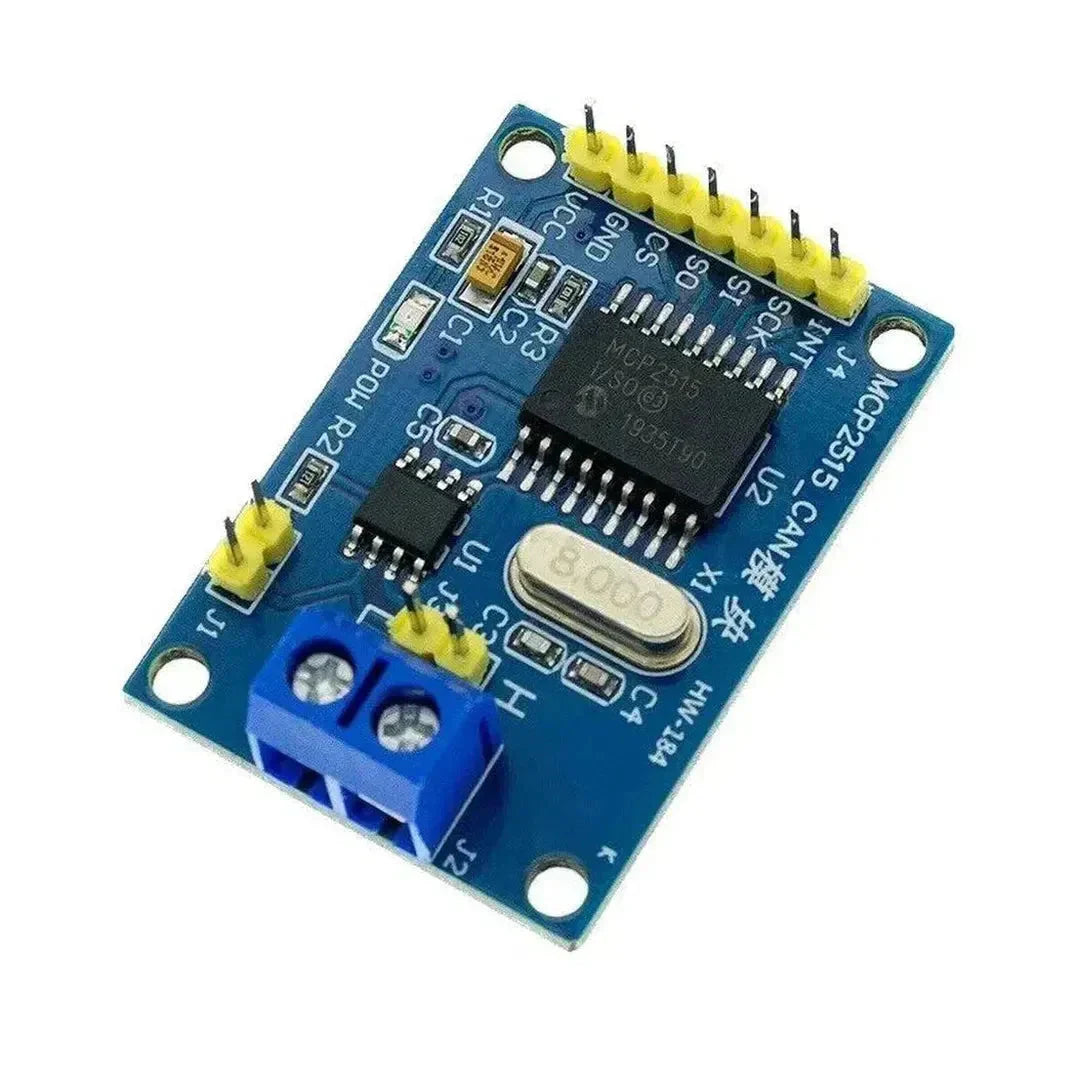
Introductie van de MCP2515 CAN -controller
De MCP2515 is een stand-alone Controller Area Network (CAN) -controller die interfaces met microcontrollers interfaces via de seriële perifere interface (SPI). Het behandelt het ingewikkelde CAN-protocol, waardoor ontwikkelaars zich kunnen concentreren op applicatie-logica op een hoger niveau. Belangrijkste kenmerken van de MCP2515 zijn onder meer:
- Ondersteuning voor standaard en uitgebreide CAN -frames.
- Ingebouwde foutafhandelings- en filtermechanismen.
- Compatibiliteit met verschillende microcontrollers, waaronder Arduino.
- Laag stroomverbruik, waardoor het geschikt is voor ingebedde systemen.
Door de MCP2515 te integreren met een Arduino, kunt u CAN-busmogelijkheden toevoegen aan uw projecten, waardoor communicatie met andere door can-enabled apparaten of netwerken mogelijk wordt.
Het opzetten van de MCP2515 met Arduino
Om aan de slag te gaan, heb je de volgende componenten nodig:
- Arduino Board (bijv. Arduino Uno)
- MCP2515 CAN -module (wordt vaak geleverd met een TJA1050 kan zendelen)
- Jumper draden
- Breadboard (optioneel)
Hier is een stapsgewijze handleiding voor het opzetten van de MCP2515 met uw Arduino:
1. De MCP2515 bedraden aan Arduino
Sluit de MCP2515 -module als volgt aan op de Arduino:
- VCC naar 5V Op Arduino
- GND naar GND Op Arduino
- CS naar Pin 10 Op Arduino
- Sck naar Pin 13 Op Arduino
- SI (Mosi) aan Pin 11 Op Arduino
- DUS (Miso) aan Pin 12 Op Arduino
- Inteken naar Pin 2 Op Arduino
Arduino MCP2515
------- -------
5V ------> VCC
GND ------> GND
Pin 10 ------> CS
Pin 13 ------> SCK
Pin 11 ------> SI (MOSI)
Pin 12 ------> SO (MISO)
Pin 2 ------> INT
2. De vereiste bibliotheken installeren
Om te communiceren met de MCP2515 mcp_can bibliotheek. Installeer het via de Arduino Library Manager:
- Open de Arduino Ide.
- Navigeren naar Sketch> Library innemen> Bibliotheken beheren ...
- Zoeken naar mcp_can en installeer de mcp_can Bibliotheek door Cory J. Fowler.
3. De voorbeeldcode uploaden
Hier is een fundamenteel voorbeeld om CAN -berichten te verzenden en te ontvangen met behulp van de MCP2515 en Arduino:
Een CAN -bericht verzenden
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
byte data[] = {0x00, 0xFF, 0xAA, 0x55, 0x33, 0x66, 0x99, 0xCC};
// Send data: CAN ID = 0x100, data length = 8
if (CAN0.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully!");
} else {
Serial.println("Error Sending Message...");
}
delay(1000);
}
Een CAN -bericht ontvangen
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
unsigned long canId;
byte len = 0;
byte buf[8];
// Check if data has been received
if (CAN0.checkReceive() == CAN_MSGAVAIL) {
CAN0.readMsgBuf(&canId, &len, buf);
Serial.print("CAN ID: 0x");
Serial.println(canId, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
In de Sending Sketch verzendt de Arduino een CAN -bericht met ID 0x100 elke seconde. De ontvangende schets luistert voor inkomende CAN -berichten en drukt de ID en gegevens af naar de seriële monitor.
Toepassingen van CAN BUS met Arduino
Integratie van CAN -bus met Arduino opent een veelvoud aan applicaties voorbij automotive -systemen. Sommige populaire use -cases zijn:
- Robotica: Schakel communicatie in tussen meerdere motorcontrollers en sensoren.
- Industriële automatisering: Gegevensuitwisseling tussen verschillende machines en besturingseenheden vergemakkelijken.
- Home Automatisering: Verbind verschillende slimme apparaten binnen een uniform netwerk.
- Data -acquisitiesystemen: Verzamel en verwerk gegevens van meerdere sensoren efficiënt.
Conclusie
Het CAN -busprotocol, met zijn betrouwbaarheid en efficiëntie, dient als een ruggengraat voor communicatie in tal van ingebedde systemen. Door gebruik te maken van de MCP2515 CAN -controller met een Arduino, kunnen ontwikkelaars moeiteloos CAN -busmogelijkheden in hun projecten integreren. Of u nu werkt aan automotive -systemen, industriële automatisering of complexe robotica, begrip en hefboomwerking kan de bus het communicatiekader van uw systeem aanzienlijk verbeteren.
Met de uitgebreide gidsen en voorbeelden ben je goed uitgerust om te beginnen met het integreren van CAN BUS in je volgende Arduino-project. Gelukkig coderen!

















































































































































