
De VL53L0X is een time-of-flight (TOF) sensor die afstanden meet met behulp van lasertechnologie. Het wordt vaak gebruikt in robotica, automatisering en obstakeldetectietoepassingen. Deze gids zal u doorlopen door het opzetten en gebruiken van de VL53L0X met een Raspberry Pi.
Wat u nodig hebt
- Raspberry Pi (Elk model met GPIO -ondersteuning, bijvoorbeeld PI 3, PI 4)
- VL53L0X afstandssensormodule
- Breadboard en jumper draden
- Python geïnstalleerd Op de Raspberry Pi
Stap 1: De VL53L0X bedraden naar de Raspberry Pi
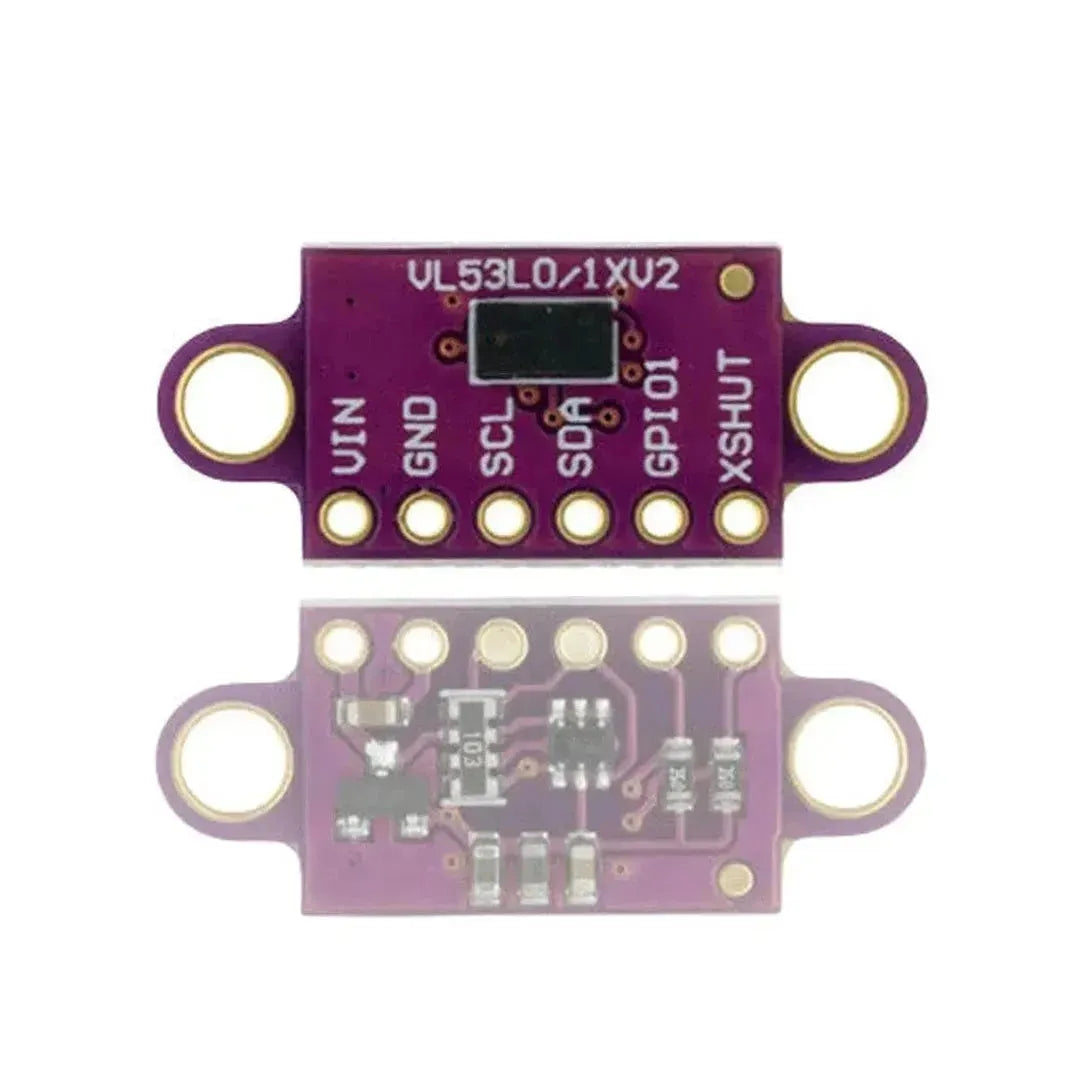
De VL53L0X communiceert via I2C, dus we moeten het verbinden met de I2C -pinnen van de Raspberry Pi.
Verbindingen
| VL53L0X PIN | Raspberry Pi Pin |
|---|---|
| VCC | 3.3V (pin 1) |
| GND | Grond (pin 6) |
| SDA | SDA (Pin 3, GPIO2) |
| SCL | SCL (Pin 5, GPIO3) |
| Xshut (optioneel) | Elke GPIO (om sensor in te schakelen/uitschakelen) |
Stap 2: Schakel I2C in op de Raspberry Pi
Omdat de VL53L0X via I2C communiceert, moeten we de I2C -interface inschakelen.
-
Open de Raspberry Pi -configuratie -tool:
sudo raspi-config -
Navigeren naar Interface -opties> I2C en schakel het in.
-
Start de Raspberry Pi opnieuw op:
sudo reboot -
Controleer of de sensor wordt gedetecteerd door te draaien:
sudo i2cdetect -y 1De VL53L0X zou moeten verschijnen op 0x29.
Stap 3: Installeer vereiste bibliotheken
- Werk de pakketlijst van de Raspberry Pi bij:
sudo apt update && sudo apt upgrade -y - Installeer de benodigde Python -bibliotheken:
sudo apt install -y python3-pip i2c-tools python3-smbus pip3 install adafruit-circuitpython-vl53l0x
Stap 4: Afstandsgegevens lezen van de VL53L0X
Hier is een Python -script om afstanden te meten met behulp van de VL53L0X -sensor.
Python Code Voorbeeld
import time
import board
import busio
import adafruit_vl53l0x
# Initialize I2C and VL53L0X sensor
i2c = busio.I2C(board.SCL, board.SDA)
vl53 = adafruit_vl53l0x.VL53L0X(i2c)
try:
while True:
distance = vl53.range # Read distance in millimeters
print(f"Distance: {distance} mm")
time.sleep(1)
except KeyboardInterrupt:
print("Exiting...")
Stap 5: Toepassingen van de VL53L0X
- Obstakeldetectie - Gebruik in robotica en autonome voertuigen om objecten te detecteren.
- Nabijheidsdetectie - Automatiseer deuren, beveiligingssystemen of IoT -applicaties.
- Niveau meting - Controleer het vloeistofniveau in een container.
- Gebaarherkenning - Volg handbewegingen voor touchless interfaces.
Problemen oplossen
-
Apparaat niet gedetecteerd (
i2cdetecttoont niet0x29)- Controleer de bedrading van SDA/SCL pinnen.
- Zorg ervoor dat de I2C -interface is ingeschakeld op de Raspberry Pi.
-
Onnauwkeurige metingen
- Zorg ervoor dat de sensor niet wordt belemmerd.
- Vermijd reflecterende oppervlakken die onjuiste metingen kunnen veroorzaken.
-
Meerdere VL53L0X -sensoren
- Gebruik de Xshut PIN om verschillende I2C -adressen toe te wijzen aan meerdere VL53L0X -sensoren.
Conclusie
De VL53L0X is een krachtige lasergebaseerde afstandssensor Dat integreert naadloos met de Raspberry Pi. Door deze gids te volgen, kunt u afstanden nauwkeurig meten voor robotica, automatisering en IoT -projecten. Experimenteer met verschillende toepassingen om het volledige potentieel ervan te ontgrendelen! 🚀

















































































































































