





De MCP2515 is een busmodule CAN (Controller Area Network) die veel wordt gebruikt voor automotive en industriële communicatie. Het stelt Arduino in staat om te communiceren met op CAN gebaseerde systemen om gegevens efficiënt te verzenden en ontvangen. Deze zelfstudie zal u begeleiden door het instellen en gebruiken van de MCP2515 -module met Arduino.
Wat u nodig hebt
- MCP2515 kan busmodule
- Arduino Board (bijv. UNO, Mega, Nano)
- Can-Bus compatibel apparaat of een andere MCP2515-module
- Jumper draden
- Breadboard (optioneel)
- Een computer met de Arduino Ide geïnstalleerd
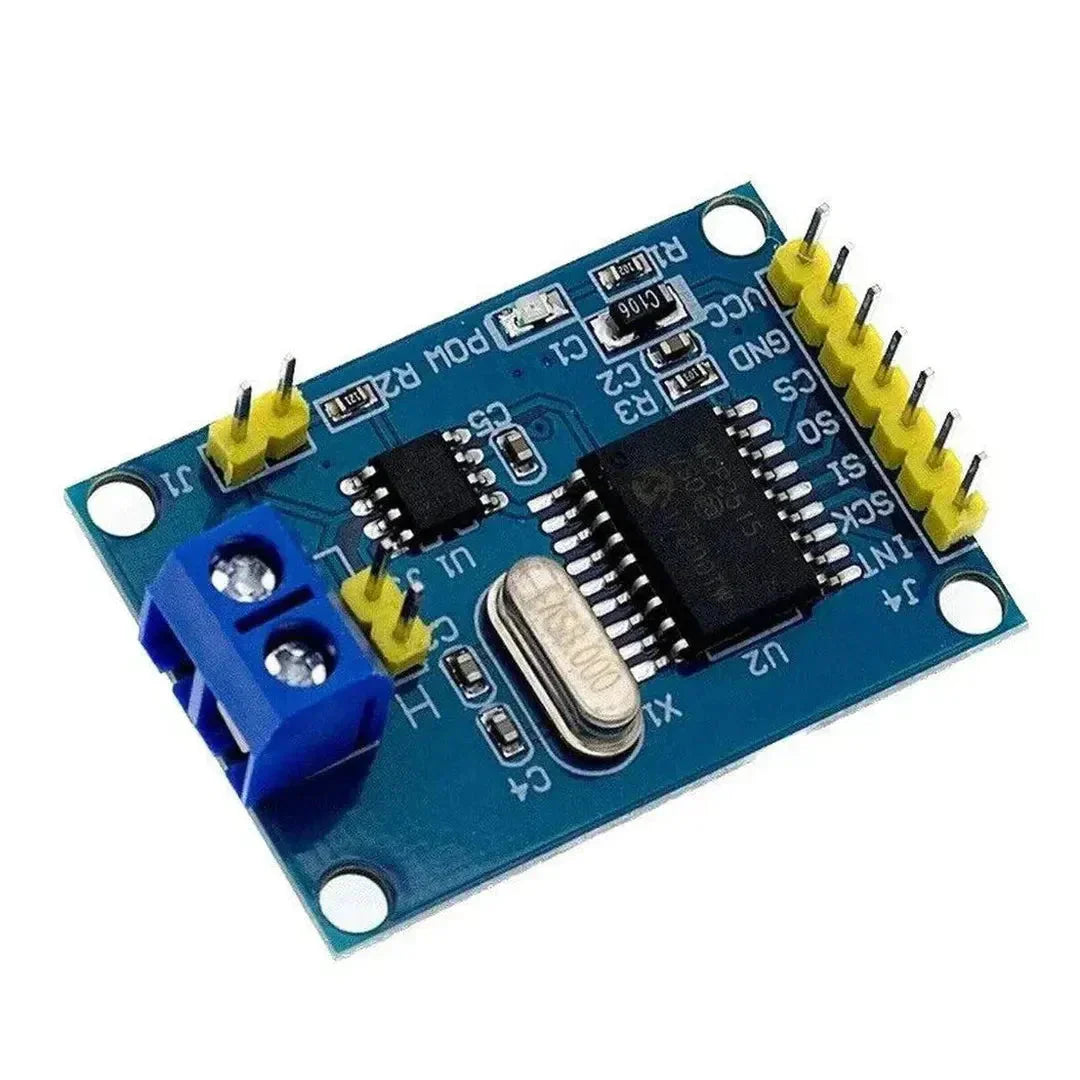
Stap 1: Inzicht in de MCP2515 -module
De MCP2515 -module maakt gebruik van de MCP2515 CAN CAN -controller IC en TJA1050 kan transceiver. De module communiceert met de Arduino via de SPI -interface.
MCP2515 Pinout
| Pin | Functie |
|---|---|
| VCC | Voeding (5V) |
| GND | Grond |
| CS | Chip selecteren |
| DUS | SPI -gegevensuitvoer |
| SI | SPI -gegevensinvoer |
| Sck | SPI -klok |
| Inteken | Onderbrekingsuitgang |
Stap 2: De MCP2515 bedraden aan Arduino
Hieronder is de bedradingshandleiding voor het aansluiten van de MCP2515 -module met een Arduino UNO:
| MCP2515 PIN | Arduino Pin |
|---|---|
| VCC | 5V |
| GND | GND |
| CS | Pin 10 |
| DUS | Pin 12 |
| SI | Pin 11 |
| Sck | Pin 13 |
| Inteken | Pin 2 |
Opmerking: Voor andere Arduino -boards, zorg ervoor dat de SPI -pinnen overeenkomen met de pinout van uw specifieke bord.
Stap 3: Installeer de vereiste bibliotheek
De Mcp_can Bibliotheek vereenvoudigt de interactie met de MCP2515 -module.
Stappen om MCP_CAN -bibliotheek te installeren:
- Open de Arduino Ide.
- Gaan naar Schetsen > Library innemen > Bibliotheken beheren.
- Zoek naar "mcp_can" in de bibliotheekbeheerder.
- Klikken Installeren.
Stap 4: Upload de code
Zendcode (gegevens verzenden op de CAN -bus):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
if (CAN.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully");
} else {
Serial.println("Error Sending Message");
}
delay(1000); // Send data every second
}
Ontvangscode (gegevens lezen van de blikbus):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char len = 0;
unsigned char buf[8];
if (CAN.checkReceive() == CAN_MSGAVAIL) {
CAN.readMsgBuf(&len, buf);
unsigned long id = CAN.getCanId();
Serial.print("Message ID: 0x");
Serial.println(id, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
Stap 5: Test de installatie
- Sluit de MCP2515 -module aan op uw Arduino zoals beschreven in stap 2.
- Upload de zendercode naar de ene Arduino en de ontvangercode naar een andere Arduino.
- Sluit de CAN_H- en CAN_L -pinnen van beide MCP2515 -modules aan om de CAN -bus op te zetten.
- Open de seriële monitor op beide Arduinos en stel het baudrate in op
115200. - Op de ontvanger Arduino zou je de berichten moeten zien die door de zender Arduino zijn verzonden.
Problemen oplossen
- Geen gegevens ontvangen: Controleer de CAN_H- en CAN_L -verbindingen tussen de modules.
- Initialisatie is mislukt: Zorg ervoor dat de SPI -verbindingen en CS -pin overeenkomen met uw opstelling.
- Onregelmatige communicatie: Controleer of beide modules dezelfde baudsnelheid gebruiken (in dit voorbeeld 500 kbps).
Toepassingen van de MCP2515 kan busmodule
- Voertuigdiagnostiek (OBD-II)
- Industriële automatiseringssystemen
- Robotica -communicatie
- IoT -apparaten met CAN -busnetwerken
Conclusie
U hebt met succes de MCP2515 CAN CAN -module met Arduino ingesteld voor het verzenden en ontvangen van gegevens. Deze module is ongelooflijk veelzijdig voor toepassingen die betrouwbare communicatie nodig hebben via een blikbus. Experimenteer met verschillende bericht -ID's en data -payloads om het volledige potentieel ervan te verkennen!



































































































































