




De 28BYJ-48 Stepper-motor is een populaire, betaalbare steppermotor die vaak wordt gebruikt in doe-het-zelf-elektronische projecten. In combinatie met het ULN2003 -stuurplank is het een uitstekende keuze voor applicaties die precieze beweging vereisen, zoals robotica, camerakleed en thuisautomatisering. Deze tutorial zal u begeleiden door het opzetten en besturen van de 28BYJ-48 Stepper-motor met Arduino.
Wat u nodig hebt
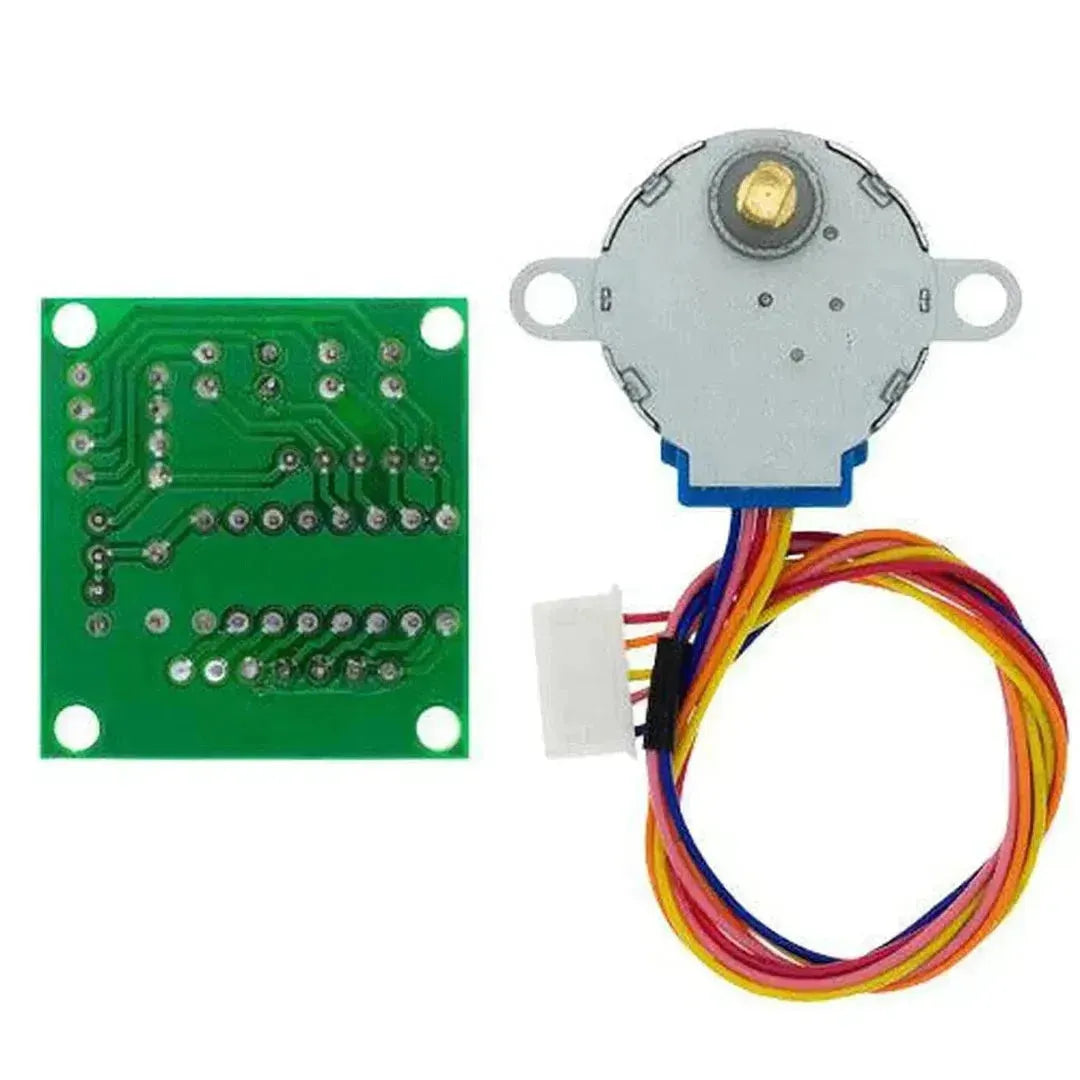
- 28BYJ-48 STEPPER MOTOR
- Uln2003 Driver Board
- Arduino Board (bijv. UNO, Mega, Nano)
- Jumper draden
- Breadboard (optioneel)
- Een computer met de Arduino Ide geïnstalleerd
Stap 1: Inzicht in de componenten
28BYJ-48 STEPPER MOTOR
- De 28BYJ-48 is een 4-fase, 5-draads steppermotor met een versnellingsreductieverhouding van ongeveer 1:64, waardoor het nauwkeurig en betrouwbaar is.
Uln2003 Driver Board
- De ULN2003 is een bestuurdersbord dat speciaal is ontworpen voor de 28BYJ-48-motor. Het bevat LED's om de actieve fase van de motor aan te geven en vereenvoudigt verbindingen met de Arduino.
Stap 2: de uln2003 bedraden aan Arduino
-
Sluit de 28BYJ-48-motor aan op het Driver Board Uln2003. De connector van de motor past rechtstreeks in de koptekst met het label "in" op het bord.
-
Gebruik jumper draden om de ULN2003 -stuurbord als volgt op de Arduino te verbinden:
| Uln2003 pin | Arduino Pin |
|---|---|
| In1 | PIN 8 |
| In2 | Pin 9 |
| In3 | Pin 10 |
| In4 | Pin 11 |
| VCC | 5V |
| GND | GND |
Stap 3: Installeer de Stepper -bibliotheek
De Arduino IDE bevat een ingebouwde bibliotheek voor stappenmotorbesturing.
- Open de Arduino Ide.
- Gaan naar Schetsen > Library innemen > Stepper.
Stap 4: Upload de code
Hier is een basisvoorbeeldcode om de steppermotor te bedienen:
#include <Stepper.h>
// Define the number of steps per revolution for the 28BYJ-48 motor
#define STEPS_PER_REV 2048
// Initialize the Stepper library on pins 8, 9, 10, and 11
Stepper stepper(STEPS_PER_REV, 8, 10, 9, 11);
void setup() {
stepper.setSpeed(15); // Set motor speed (in RPM)
Serial.begin(9600);
Serial.println("28BYJ-48 Stepper Motor Test");
}
void loop() {
Serial.println("Moving Forward");
stepper.step(STEPS_PER_REV); // Move one full revolution forward
delay(1000);
Serial.println("Moving Backward");
stepper.step(-STEPS_PER_REV); // Move one full revolution backward
delay(1000);
}
Stap 5: Test de installatie
- Sluit de Arduino via USB aan op uw computer.
- Open de Arduino IDE en selecteer de juiste Bord En Haven onder de Hulpmiddelen menu.
- Upload de code naar de Arduino door te klikken Uploaden.
- Zodra de code is geüpload, moet de stappenmotor een volledige revolutie naar voren draaien en vervolgens herhaaldelijk achteruit.
Geavanceerde controle met versnelling
Voor soepeler en preciezere controle kunt u de Accelstepper bibliotheek in plaats van de ingebouwde Stepper-bibliotheek. Hier is een voorbeeld:
#include <AccelStepper.h>
// Define the motor interface type
#define HALFSTEP 8
// Initialize the AccelStepper library
AccelStepper stepper(HALFSTEP, 8, 10, 9, 11);
void setup() {
stepper.setMaxSpeed(1000); // Set maximum speed
stepper.setAcceleration(500); // Set acceleration
stepper.setSpeed(200); // Set initial speed
}
void loop() {
stepper.runSpeed(); // Continuous rotation
}
Problemen oplossen
- Motor is niet bewegend: Controleer alle verbindingen en zorg ervoor dat de juiste pennen in de code worden gedefinieerd.
- Onregelmatige beweging: Controleer of de voeding van de motor voldoende is en dat de code overeenkomt met uw opstelling.
- Laag koppel: De 28BYJ-48 is geen high-torque motor. Zorg ervoor dat het niet overbelast is.
Toepassingen van 28BYJ-48 steppermotor
- Camerariders
- Robotachtige armen
- Geautomatiseerde jaloezieën
- 3D -printermechanismen
Conclusie
U hebt de 28BYJ-48 Stepper-motor met succes opgezet en geregeld met de ULN2003-driver en Arduino. Deze betaalbare en betrouwbare motor is perfect voor verschillende doe -het -zelfprojecten. Experimenteer met verschillende snelheden, stappen en besturingsmethoden om uw projecten dynamischer te maken!



































































































































