
. VL53L0X to czujnik czasu lotu (TOF), który dokładnie mierzy odległości za pomocą technologii laserowej. Jest powszechnie stosowany w aplikacjach robotyki, automatyzacji i wykrywania przeszkód. Ten przewodnik poprowadzi Cię przez konfigurowanie i korzystanie z VL53L0X z Raspberry Pi.
Czego będziesz potrzebować
- Raspberry Pi (Każdy model z obsługą GPIO, np. PI 3, PI 4)
- Moduł czujnika odległości VL53L0X
- Druty chleba i skoczków
- Zainstalowany Python na Raspberry Pi
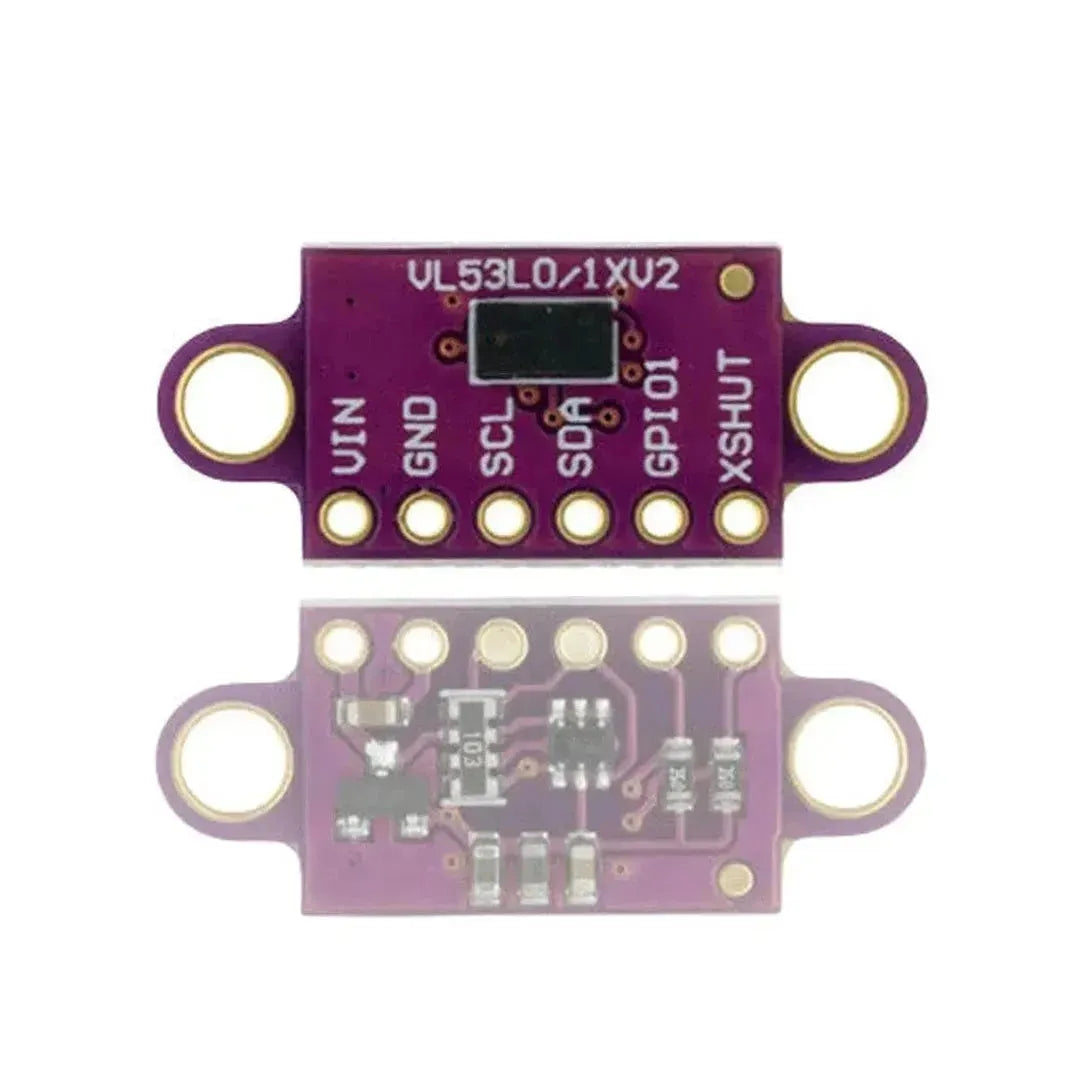
Krok 1: Okablowanie VL53L0X do Raspberry Pi
. VL53L0X komunikuje się przez I2C, więc musimy podłączyć go do pinów I2C Raspberry Pi.
Znajomości
| VL53L0X Pin | Pin Raspberry Pi |
|---|---|
| VCC | 3,3 V (pin 1) |
| GND | Uziemienie (pin 6) |
| SDA | SDA (pin 3, GPIO2) |
| Scl | SCL (pin 5, GPIO3) |
| Xshut (opcjonalnie) | Każdy GPIO (aby włączyć/wyłączyć czujnik) |
Krok 2: Włącz I2C na Raspberry Pi
Ponieważ VL53L0X komunikuje się ponad I2C, musimy włączyć interfejs I2C.
-
Otwórz narzędzie konfiguracyjne Raspberry Pi:
sudo raspi-config -
Przejść do Opcje interfejsu> i2c i włącz to.
-
Uruchom ponownie Raspberry Pi:
sudo reboot -
Sprawdź, czy czujnik jest wykrywany przez uruchomienie:
sudo i2cdetect -y 1VL53L0X powinien pojawić się w 0x29.
Krok 3: Zainstaluj wymagane biblioteki
- Zaktualizuj listę pakietów Raspberry Pi:
sudo apt update && sudo apt upgrade -y - Zainstaluj niezbędne biblioteki Pythona:
sudo apt install -y python3-pip i2c-tools python3-smbus pip3 install adafruit-circuitpython-vl53l0x
Krok 4: Dane odległości od odczytu z VL53L0X
Oto skrypt Python do pomiaru odległości za pomocą czujnika VL53L0X.
Przykład kodu Pythona
import time
import board
import busio
import adafruit_vl53l0x
# Initialize I2C and VL53L0X sensor
i2c = busio.I2C(board.SCL, board.SDA)
vl53 = adafruit_vl53l0x.VL53L0X(i2c)
try:
while True:
distance = vl53.range # Read distance in millimeters
print(f"Distance: {distance} mm")
time.sleep(1)
except KeyboardInterrupt:
print("Exiting...")
Krok 5: Zastosowania VL53L0X
- Wykrywanie przeszkód - Użyj w robotyce i pojazdach autonomicznych do wykrywania obiektów.
- Wyczuwanie bliskości - Zautomatyzuj drzwi, systemy bezpieczeństwa lub aplikacje IoT.
- Pomiar poziomu - Monitoruj poziom cieczy w pojemniku.
- Rozpoznawanie gestów - Śledzenie ruchów ręcznych dla bezdotykowych interfejsów.
Rozwiązywanie problemów
-
Urządzenie nie zostało wykryte (
i2cdetectnie pokazuje0x29)- Sprawdź okablowanie SDA/SCL szpilki.
- Upewnij się, że interfejs I2C jest włączony na Raspberry Pi.
-
Niedokładne odczyty
- Upewnij się, że czujnik nie jest zasłonięty.
- Unikaj powierzchni odblaskowych, które mogą powodować nieprawidłowe odczyty.
-
Wiele czujników VL53L0X
- Użyj Xshut PIN, aby przypisać różne adresy I2C do wielu czujników VL53L0X.
Wniosek
VL53L0X jest potężnym Laserowy czujnik odległości To bezproblemowo integruje się z Raspberry Pi. Postępując zgodnie z tym przewodnikiem, możesz dokładnie zmierzyć odległości dla projektów robotyki, automatyzacji i IoT. Eksperymentuj z różnymi aplikacjami, aby odblokować pełny potencjał! 🚀

















































































































































