





MCP2515 to moduł magistrali CAN (Controller Area Network) szeroko stosowany do komunikacji motoryzacyjnej i przemysłowej. Umożliwia Arduino interfejs z systemami opartymi na CAN w celu wydajnego wysyłania i odbierania danych. Ten samouczek poprowadzi Cię przez konfigurowanie i użycie modułu MCP2515 z Arduino.
Czego będziesz potrzebować
- Moduł magistrali MCP2515
- Arduino Board (np. UNO, Mega, Nano)
- Urządzenie kompatybilne z CAN lub inny moduł MCP2515
- Przewody zworki
- Breadboard (opcjonalnie)
- Komputer z zainstalowanym Arduino IDE
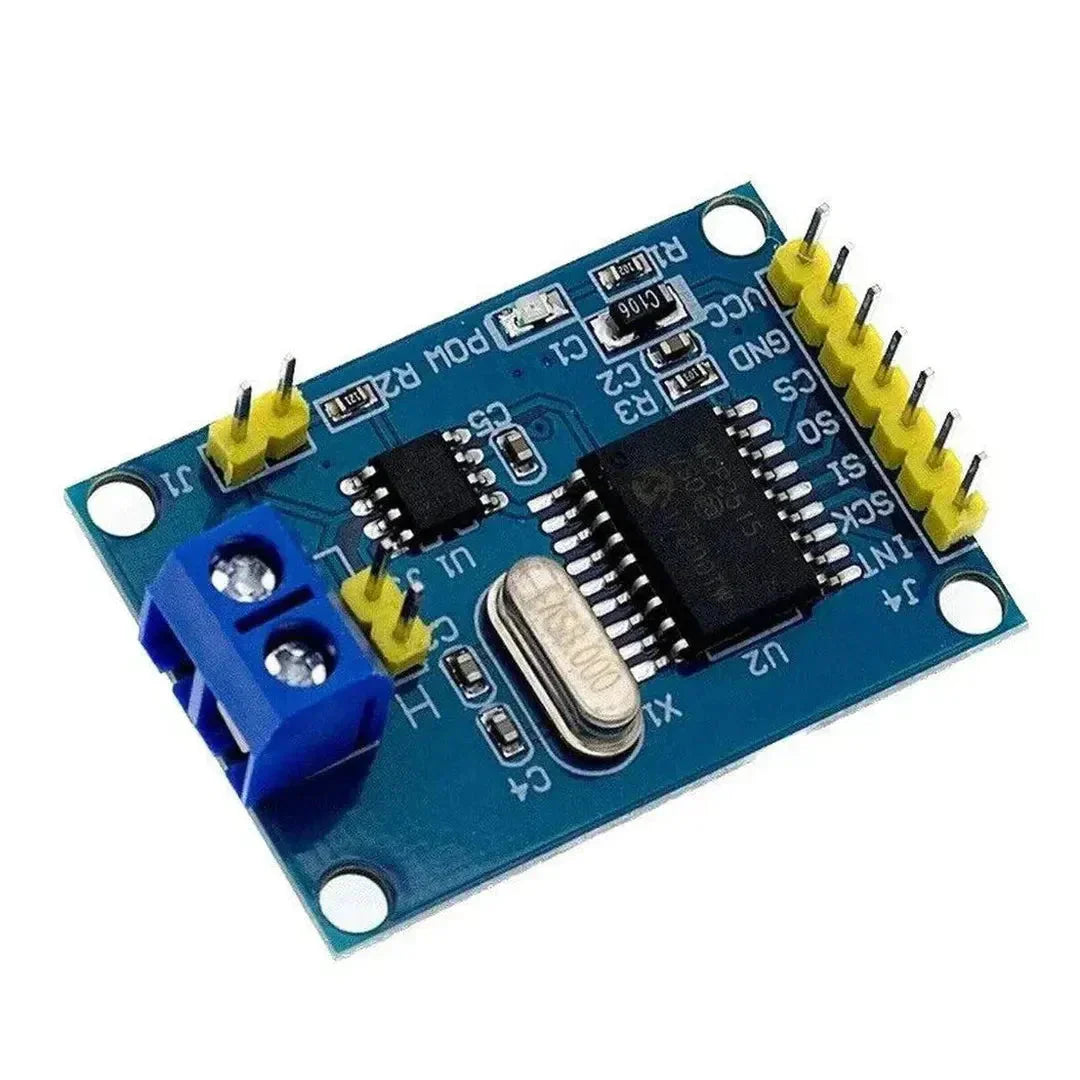
Krok 1: Zrozumienie modułu MCP2515
Moduł MCP2515 wykorzystuje MCP2515 CAN CAND IC i TJA1050 CAN TRICEiver. Moduł komunikuje się z Arduino za pośrednictwem interfejsu SPI.
MCP2515 Pinout
| Szpilka | Funkcjonować |
|---|---|
| VCC | Zasilacz (5 V) |
| GND | Grunt |
| Cs | Chip Wybierz |
| WIĘC | Wyjście danych SPI |
| SI | Wejście danych SPI |
| SCK | Zegar SPI |
| Int | Wyjście przerwania |
Krok 2: Okablowanie MCP2515 do Arduino
Poniżej znajduje się przewodnik podłączania modułu MCP2515 z Arduino Uno:
| Pin MCP2515 | PIN Arduino |
|---|---|
| VCC | 5v |
| GND | GND |
| Cs | Pin 10 |
| WIĘC | Pin 12 |
| SI | Pin 11 |
| SCK | Pin 13 |
| Int | Pin 2 |
Notatka: W przypadku innych tablic Arduino upewnij się, że piny SPI odpowiadają pinout konkretnej płyty.
Krok 3: Zainstaluj wymaganą bibliotekę
. MCP_CAN Biblioteka upraszcza interakcję z modułem MCP2515.
Kroki do zainstalowania biblioteki MCP_CAN:
- Otwórz Arduino IDE.
- Idź do Naszkicować > Uwzględnij bibliotekę > Zarządzaj bibliotekami.
- Wyszukaj „MCP_CAN” w menedżerze biblioteki.
- Trzask Zainstalować.
Krok 4: Prześlij kod
Transmitter Code (Sending Data on the CAN Bus):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
if (CAN.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully");
} else {
Serial.println("Error Sending Message");
}
delay(1000); // Send data every second
}
Kod odbiornika (czytanie danych z magistrali CAN):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char len = 0;
unsigned char buf[8];
if (CAN.checkReceive() == CAN_MSGAVAIL) {
CAN.readMsgBuf(&len, buf);
unsigned long id = CAN.getCanId();
Serial.print("Message ID: 0x");
Serial.println(id, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
Krok 5: Przetestuj konfigurację
- Podłącz moduł MCP2515 z Arduino, jak opisano w kroku 2.
- Prześlij kod nadajnika do jednego Arduino i kodu odbiornika do innego Arduino.
- Podłącz piny CAN_H i CAN_L obu modułów MCP2515, aby ustanowić magistralę CAN.
- Otwórz monitor szeregowy zarówno na Arduino i ustaw wskaźnik BAUD
115200. - Na odbiorniku Arduino powinieneś zobaczyć wiadomości wysyłane przez nadajnik Arduino.
Rozwiązywanie problemów
- Brak danych: Sprawdź połączenia CAN_H i CAN_L między modułami.
- Inicjalizacja nie powiodła się: Upewnij się, że połączenia SPI i PIN CS pasują do konfiguracji.
- Komunikacja nieregularna: Sprawdź, czy oba moduły wykorzystują tę samą szybkość transmisji (500 kb / s w tym przykładzie).
Zastosowania modułu magistrali MCP2515
- Diagnostyka pojazdów (OBD-II)
- Systemy automatyzacji przemysłowej
- Komunikacja robotyka
- Urządzenia IoT z sieciami autobusowymi CAN
Wniosek
Z powodzeniem skonfigurowałeś moduł magistrali MCP2515 z Arduino do wysyłania i odbierania danych. Ten moduł jest niezwykle wszechstronny w przypadku aplikacji wymagających niezawodnej komunikacji w autobusie CAN. Eksperymentuj z różnymi identyfikatorami wiadomości i ładunkami danych, aby zbadać pełny potencjał!



































































































































