Pe tărâmul aplicațiilor auto și industriale, comunicarea fiabilă între mai multe microcontrolere este esențială. Protocolul de autobuz al rețelei de controler (CAN) a apărut ca o soluție robustă pentru astfel de nevoi. Această postare pe blog se încadrează în elementele fundamentale ale protocolului CAN Bus și demonstrează modul de integrare a controlorului MCP2515 cu un Arduino, permițând o comunicare perfectă în proiectele dvs.
Ce este protocolul de autobuz?
Busul de rețea a zonei de control (CAN) este un standard robust de autobuz de vehicule conceput pentru a permite microcontrolerelor și dispozitivelor să comunice între ele fără un computer gazdă. Dezvoltat de Bosch în anii 1980, CAN Bus a devenit un standard în sistemele auto, dar este utilizat pe scară largă în automatizarea industrială și în alte sisteme încorporate.
Caracteristicile cheie ale protocolului CAN Bus includ:
- Configurare multi-master: Mai multe noduri pot comunica pe același autobuz fără un controler central.
- Prioritizarea mesajului: Mesajele sunt prioritare pe baza identificatorului lor, asigurând transmiterea datelor critice mai întâi.
- Detectarea erorilor: Mecanisme robuste de detectare a erorilor, inclusiv verificări CRC și biți de recunoaștere, îmbunătățesc fiabilitatea.
- Comunicare de mare viteză: Suportă ratele de date de până la 1 Mbps, potrivite pentru aplicații în timp real.
Aceste caracteristici fac autobuzul Can ideal pentru scenarii în care mai multe dispozitive trebuie să comunice eficient și în mod fiabil, cum ar fi în sisteme de gestionare a motoarelor de vehicule, automatizare industrială și robotică.
Introducerea controlerului MCP2515 Can
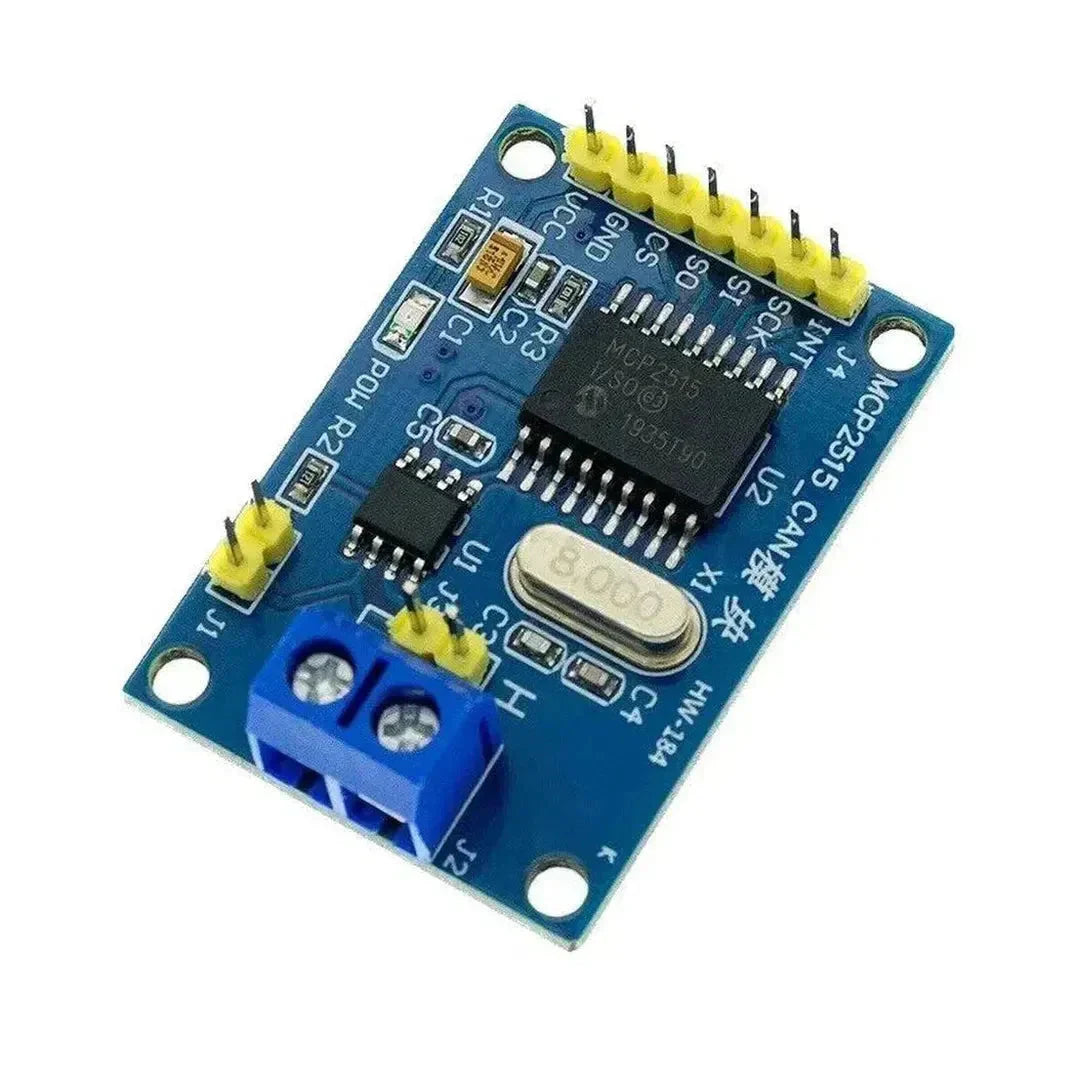
MCP2515 este un controler de rețea de regulator (CAN) care interfață cu microcontrolerele prin interfața periferică serială (SPI). Se ocupă de protocolul complicat Can, permițând dezvoltatorilor să se concentreze pe logica aplicației de nivel superior. Caracteristicile cheie ale MCP2515 includ:
- Asistență pentru cadre standard și extinse.
- Mecanisme de manipulare și filtrare a erorilor încorporate.
- Compatibilitatea cu diverse microcontrolere, inclusiv Arduino.
- Consum redus de energie, ceea ce îl face potrivit pentru sisteme încorporate.
Prin integrarea MCP2515 cu un Arduino, puteți adăuga capacități de autobuz CAN la proiectele dvs., permițând comunicarea cu alte dispozitive sau rețele activate cu CAN.
Configurarea MCP2515 cu Arduino
Pentru a începe, veți avea nevoie de următoarele componente:
- Board Arduino (de exemplu, Arduino Uno)
- Modulul MCP2515 Can (vine adesea cu un transceiver TJA1050))
- Fire de jumper
- Panoul de pâine (opțional)
Iată un ghid pas cu pas pentru configurarea MCP2515 cu Arduino:
1.. Cablarea MCP2515 către Arduino
Conectați modulul MCP2515 la Arduino după cum urmează:
- VCC la 5V pe Arduino
- GND la GND pe Arduino
- CS la Pinul 10 pe Arduino
- SCK la Pinul 13 pe Arduino
- SI (Mosi) la Pinul 11 pe Arduino
- AŞA (Miso) la Pinul 12 pe Arduino
- Int la Pin 2 pe Arduino
Arduino MCP2515
------- -------
5V ------> VCC
GND ------> GND
Pin 10 ------> CS
Pin 13 ------> SCK
Pin 11 ------> SI (MOSI)
Pin 12 ------> SO (MISO)
Pin 2 ------> INT
2. Instalarea bibliotecilor necesare
Pentru a comunica cu MCP2515, veți avea nevoie de MCP_CAN bibliotecă. Instalați -l prin intermediul managerului de bibliotecă Arduino:
- Deschideți IDE Arduino.
- Navigați la Schiță> Includeți biblioteca> Gestionați bibliotecile ...
- Caută MCP_CAN și instalați MCP_CAN Biblioteca de Cory J. Fowler.
3. Încărcarea codului de exemplu
Iată un exemplu de bază pentru a trimite și primi mesaje CAN folosind MCP2515 și Arduino:
Trimiterea unui mesaj CAN
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
byte data[] = {0x00, 0xFF, 0xAA, 0x55, 0x33, 0x66, 0x99, 0xCC};
// Send data: CAN ID = 0x100, data length = 8
if (CAN0.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully!");
} else {
Serial.println("Error Sending Message...");
}
delay(1000);
}
Primirea unui mesaj CAN
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
unsigned long canId;
byte len = 0;
byte buf[8];
// Check if data has been received
if (CAN0.checkReceive() == CAN_MSGAVAIL) {
CAN0.readMsgBuf(&canId, &len, buf);
Serial.print("CAN ID: 0x");
Serial.println(canId, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
În schița de trimitere, Arduino transmite un mesaj CAN cu ID 0x100 în fiecare secundă. Schița primitoare ascultă pentru mesajele de intrare și tipărește ID -ul și datele la monitorul serial.
Aplicațiile autobuzului CAN cu Arduino
Integrarea autobuzului CAN cu Arduino deschide o multitudine de aplicații dincolo de sistemele auto. Unele cazuri de utilizare populară includ:
- Robotică: Activați comunicarea între mai multe controlere motorii și senzori.
- Automatizare industrială: Facilitați schimbul de date între diferite utilaje și unități de control.
- Automatizare la domiciliu: Conectați diverse dispozitive inteligente într -o rețea unificată.
- Sisteme de achiziție de date: Colectați și prelucrați datele de la mai mulți senzori în mod eficient.
Concluzie
Protocolul CAN Bus, cu fiabilitatea și eficiența sa, servește ca coloană vertebrală pentru comunicare în numeroase sisteme încorporate. Prin utilizarea controlorului MCP2515 CAN cu un Arduino, dezvoltatorii pot integra fără efort capacitățile de autobuz CAN în proiectele lor. Indiferent dacă lucrați la sisteme auto, automatizare industrială sau robotică complexă, înțelegere și pârghie Can Bus poate îmbunătăți în mod semnificativ cadrul de comunicare al sistemului dvs.
Cu ghidurile și exemplele cuprinzătoare furnizate, sunteți bine echipat pentru a vă angaja în integrarea CAN în următorul dvs. proiect Arduino. Codificare fericită!