





MCP2515 este un modul de autobuz CAN (Controller Area Network) utilizat pe scară largă pentru comunicarea auto și industrială. Permite Arduino să interfațăm cu sistemele bazate pe CAN pentru a trimite și primi date în mod eficient date. Acest tutorial vă va ghida prin configurarea și utilizarea modulului MCP2515 cu Arduino.
Ce vei avea nevoie
- MCP2515 CAN Modul de autobuz
- Arduino Board (de exemplu, Uno, Mega, Nano)
- Dispozitiv compatibil cu CAN-BUS sau un alt modul MCP2515
- Fire de jumper
- Panoul de pâine (opțional)
- Un computer cu IDE Arduino instalat
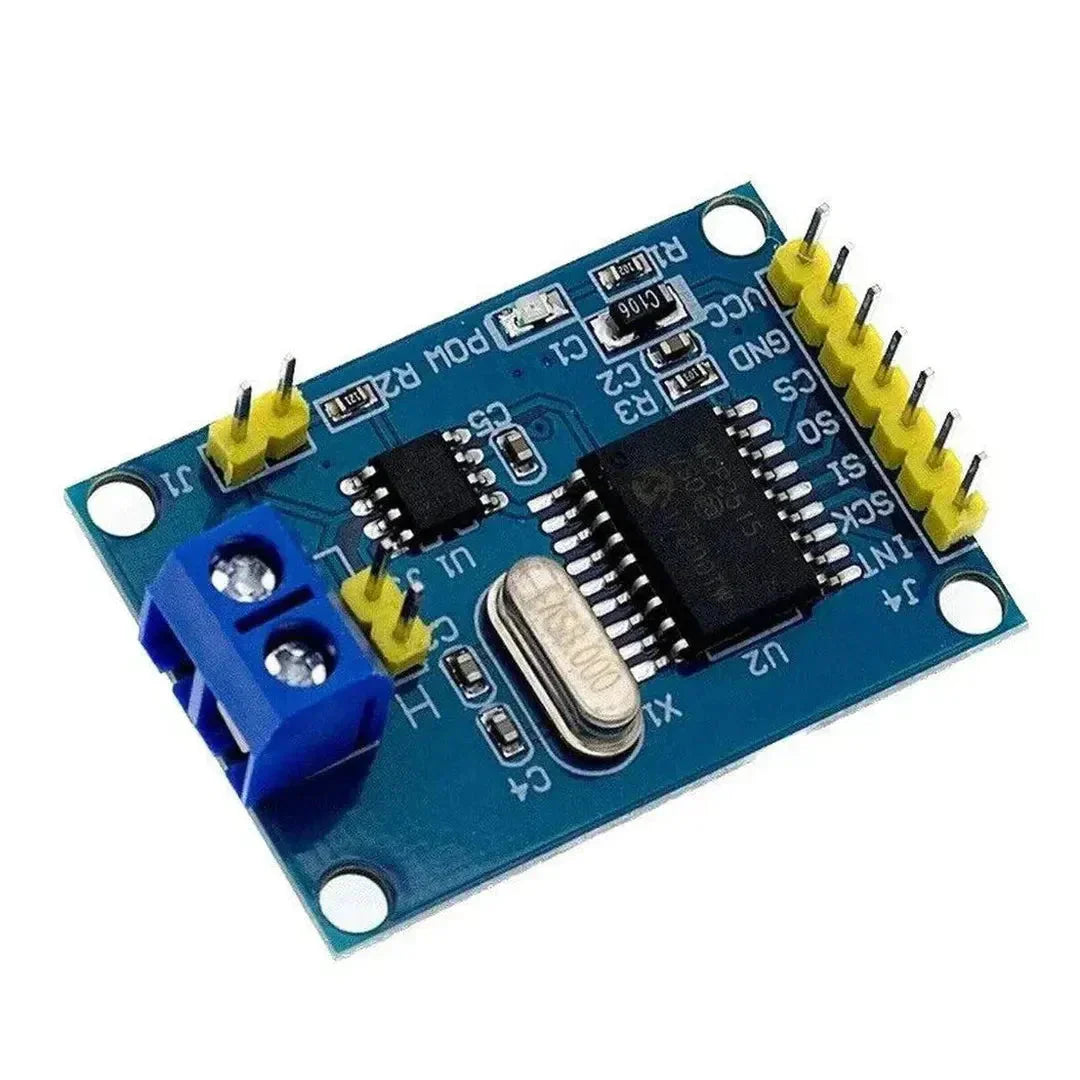
Pasul 1: Înțelegerea modulului MCP2515
Modulul MCP2515 utilizează MCP2515 Can Can CONTROLLER IC și TJA1050 Can Can Transceiver. Modulul comunică cu Arduino prin interfața SPI.
MCP2515 PINOUT
| Ac | Funcţie |
|---|---|
| VCC | Sursă de alimentare (5V) |
| GND | Sol |
| CS | CIP SELECT |
| AŞA | Ieșire de date SPI |
| SI | Intrare de date SPI |
| SCK | Ceas SPI |
| Int | Întrerupe ieșirea |
Pasul 2: Cablarea MCP2515 către Arduino
Mai jos este ghidul de cablare pentru conectarea modulului MCP2515 la un Arduino Uno:
| Pin MCP2515 | Pinul Arduino |
|---|---|
| VCC | 5V |
| GND | GND |
| CS | Pinul 10 |
| AŞA | Pinul 12 |
| SI | Pinul 11 |
| SCK | Pinul 13 |
| Int | Pin 2 |
Nota: Pentru alte tablouri Arduino, asigurați -vă că pinii SPI corespund pinut -ului consiliului dvs. specific.
Pasul 3: Instalați biblioteca necesară
MCP_CAN Biblioteca simplifică interacțiunea cu modulul MCP2515.
Pași pentru instalarea bibliotecii MCP_CAN:
- Deschideți IDE Arduino.
- Du -te la Schiţa > Include biblioteca > Gestionați bibliotecile.
- Căutați „MCP_CAN” în managerul bibliotecii.
- Clic Instala.
Pasul 4: Încărcați codul
Cod emițător (trimiterea datelor în autobuzul CAN):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
if (CAN.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully");
} else {
Serial.println("Error Sending Message");
}
delay(1000); // Send data every second
}
Codul receptorului (citirea datelor din autobuzul CAN):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char len = 0;
unsigned char buf[8];
if (CAN.checkReceive() == CAN_MSGAVAIL) {
CAN.readMsgBuf(&len, buf);
unsigned long id = CAN.getCanId();
Serial.print("Message ID: 0x");
Serial.println(id, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
Pasul 5: Testați configurarea
- Conectați modulul MCP2515 la Arduino, așa cum este descris la pasul 2.
- Încărcați codul emițătorului într -un Arduino și codul receptorului într -un alt Arduino.
- Conectați pinii CAN_H și CAN_L din ambele module MCP2515 pentru a stabili autobuzul CAN.
- Deschideți monitorul în serie atât pe Arduinos și setați rata de transfer la
115200. - Pe receptorul Arduino, ar trebui să vedeți mesajele trimise de emițătorul Arduino.
Depanare
- Nu au fost primite date: Verificați conexiunile CAN_H și CAN_L între module.
- Inițializarea a eșuat: Asigurați -vă că conexiunile SPI și pinul CS se potrivesc cu configurația dvs.
- Comunicare neregulată: Verificați dacă ambele module folosesc aceeași rată de transfer (500 kbps în acest exemplu).
Aplicații ale modulului MCP2515 CAN CAN
- Diagnosticul vehiculului (OBD-II)
- Sisteme de automatizare industrială
- Comunicare robotică
- Dispozitive IoT cu rețele de autobuz CAN
Concluzie
Ați configurat cu succes modulul MCP2515 CAN cu Arduino pentru trimiterea și primirea datelor. Acest modul este incredibil de versatil pentru aplicațiile care necesită o comunicare fiabilă asupra unui autobuz CAN. Experimentați cu diferite ID -uri de mesaje și sarcini utile de date pentru a explora potențialul maxim!



































































































































