
Ul VL53L0X este un senzor de timp de zbor (ToF) care măsoară distanțele cu precizie folosind tehnologia laser. Este utilizat în mod obișnuit în aplicații de robotică, automatizare și detectare a obstacolelor. Acest ghid vă va ghida prin configurarea și utilizarea VL53L0X cu un Raspberry Pi.
De ce veți avea nevoie
- Zmeura Pi (orice model cu suport GPIO, de exemplu, Pi 3, Pi 4)
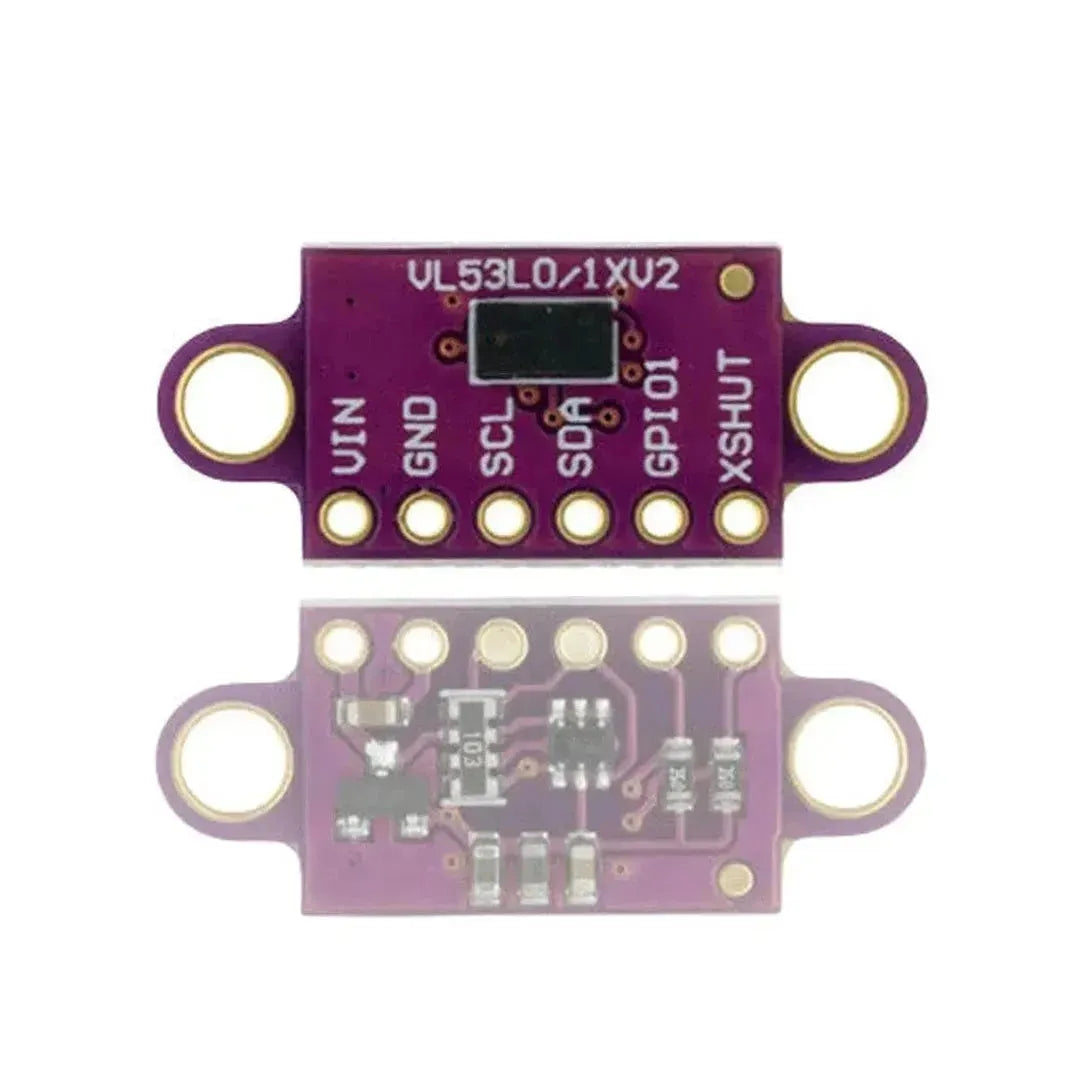
- VL53L0X Modulul senzorului de distanță
- Breadboard și Jumper Wires
- Python instalat pe Raspberry Pi
Pasul 1: Cablarea VL53L0X la Raspberry Pi
Cel VL53L0X comunică prin I2C, așa că trebuie să-l conectăm la pinii I2C ai lui Raspberry Pi.
Conexiuni
| VL53L0X Pin | Raspberry Pi Pin |
|---|---|
| VCC | 3.3V (Pin 1) |
| GND | Sol (Pin 6) |
| SDA | SDA (Pin 3, GPIO2) |
| SCL | SCL (Pin 5, GPIO3) |
| XSHUT (opțional) | Orice GPIO (pentru a activa/dezactiva senzorul) |
Pasul 2: Activați I2C pe Raspberry Pi
Deoarece VL53L0X comunică prin I2C, trebuie să activăm interfața I2C.
-
Deschideți instrumentul de configurare Raspberry Pi:
sudo raspi-config -
Navigați la Opțiuni de interfață > I2C și activați-l.
-
Reporniți Raspberry Pi:
sudo reboot -
Verificați dacă senzorul este detectat prin rularea:
sudo i2cdetect -y 1VL53L0X ar trebui să apară la 0x29.
Pasul 3: Instalați bibliotecile necesare
- Actualizați lista de pachete a Raspberry Pi:
sudo apt update && sudo apt upgrade -y - Instalați bibliotecile Python necesare:
sudo apt install -y python3-pip i2c-tools python3-smbus pip3 install adafruit-circuitpython-vl53l0x
Pasul 4: Citirea datelor de distanță de la VL53L0X
Iată un script Python pentru a măsura distanțele folosind senzorul VL53L0X.
Exemplu de cod Python
import time
import board
import busio
import adafruit_vl53l0x
# Initialize I2C and VL53L0X sensor
i2c = busio.I2C(board.SCL, board.SDA)
vl53 = adafruit_vl53l0x.VL53L0X(i2c)
try:
while True:
distance = vl53.range # Read distance in millimeters
print(f"Distance: {distance} mm")
time.sleep(1)
except KeyboardInterrupt:
print("Exiting...")
Pasul 5: Aplicații ale VL53L0X
- Detectarea obstacolelor – Utilizare în robotică și vehicule autonome pentru a detecta obiecte.
- Detectarea proximității – Automatizați ușile, sistemele de securitate sau aplicațiile IoT.
- Măsurarea nivelului – Monitorizați nivelul de lichid dintr-un recipient.
- Recunoașterea gesturilor – Urmăriți mișcările mâinilor pentru interfețe fără atingere.
Depanare
-
Dispozitiv nedetectat (
i2cdetectnu afișează0x29)- Verificați cablarea SDA/SCL pins.
- Asigurați-vă că interfața I2C este activată pe Raspberry Pi.
-
Citiri inexacte
- Asigurați-vă că senzorul nu este obstrucționat.
- Evitați suprafețele reflectorizante care pot provoca citiri incorecte.
-
Senzori VL53L0X multipli
- Utilizați fișierul XSHUT pentru a atribui diferite adrese I2C mai multor senzori VL53L0X.
Concluzie
VL53L0X este un senzor de distanță puternic bazat pe laser 🚀

















































































































































