





MCP2515 är en bussmodul (Controller Area Network) som används allmänt för bil- och industriell kommunikation. Det gör det möjligt för Arduino att gränssnitt med CAN-baserade system att skicka och ta emot data effektivt. Denna handledning leder dig genom att ställa in och använda MCP2515 -modulen med Arduino.
Vad du behöver
- MCP2515 CAN bussmodul
- Arduino Board (t.ex. Uno, Mega, Nano)
- Can-Bus-kompatibel enhet eller en annan MCP2515-modul
- Bulttrådar
- Breadboard (valfritt)
- En dator med Arduino Ide installerad
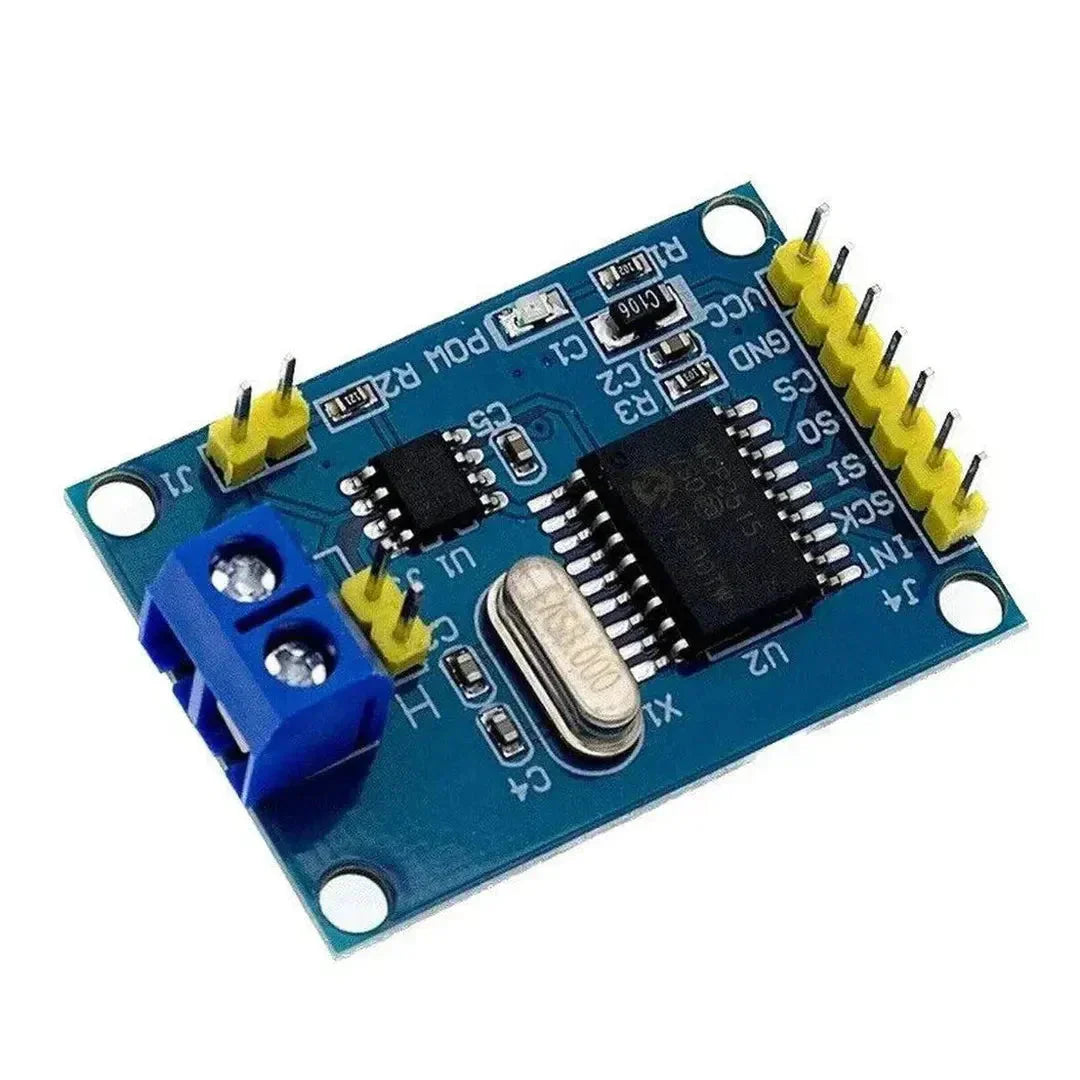
Steg 1: Förstå MCP2515 -modulen
MCP2515 -modulen använder MCP2515 Can Controller IC och TJA1050 kan sändas. Modulen kommunicerar med Arduino via SPI -gränssnittet.
Mcp2515 pinout
| Stift | Fungera |
|---|---|
| Vcc | Strömförsörjning (5V) |
| Gard | Jord |
| Cs | Chip Select |
| SÅ | SPI Data Output |
| SI | SPI -datainmatning |
| Säck | Spi -klocka |
| Int | Avbrottsutdata |
Steg 2: Kopplar MCP2515 till Arduino
Nedan är ledningsguiden för att ansluta MCP2515 -modulen till en Arduino UNO:
| MCP2515 -stift | Arduinosnål |
|---|---|
| Vcc | 5V |
| Gard | Gard |
| Cs | Stift 10 |
| SÅ | Stift 12 |
| SI | Stift 11 |
| Säck | Stift 13 |
| Int | Stift 2 |
Notera: För andra Arduino -kort, se till att SPI -stiften motsvarar ditt specifika brädes pinout.
Steg 3: Installera det nödvändiga biblioteket
De Mcp_can Biblioteket förenklar interaktion med MCP2515 -modulen.
Steg för att installera MCP_CAN -bibliotek:
- Öppna Arduino IDE.
- Gå till Skiss > Inkludera bibliotek > Hantera bibliotek.
- Sök efter "MCP_CAN" i bibliotekschefen.
- Klick Installera.
Steg 4: Ladda upp koden
Sändarkod (skickar data på buss):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
if (CAN.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully");
} else {
Serial.println("Error Sending Message");
}
delay(1000); // Send data every second
}
Mottagarkod (läser data från CAN -bussen):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char len = 0;
unsigned char buf[8];
if (CAN.checkReceive() == CAN_MSGAVAIL) {
CAN.readMsgBuf(&len, buf);
unsigned long id = CAN.getCanId();
Serial.print("Message ID: 0x");
Serial.println(id, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
Steg 5: Testa installationen
- Anslut MCP2515 -modulen till din Arduino som beskrivs i steg 2.
- Ladda upp sändarkoden till en Arduino och mottagarkoden till en annan Arduino.
- Anslut CAN_H- och CAN_L -stiften på båda MCP2515 -modulerna för att etablera CAN -bussen.
- Öppna seriell monitor på båda arduinon och ställ in baudhastigheten till
115200. - På mottagaren Arduino bör du se meddelandena som skickas av sändaren Arduino.
Felsökning
- Inga data mottagna: Kontrollera CAN_H- och CAN_L -anslutningarna mellan modulerna.
- Initialisering misslyckades: Se till att SPI -anslutningarna och CS -stiftet matchar din installation.
- Eratisk kommunikation: Kontrollera att båda modulerna använder samma baudhastighet (500 kbps i detta exempel).
Applikationer av MCP2515 CAN BUS -modulen
- Fordonsdiagnostik (OBD-II)
- Industriella automatiseringssystem
- Robotkommunikation
- IoT -enheter med bussnätverk
Slutsats
Du har framgångsrikt ställt in MCP2515 CAN BUS -modulen med Arduino för att skicka och ta emot data. Denna modul är oerhört mångsidig för applikationer som kräver tillförlitlig kommunikation över en buss. Experimentera med olika meddelande -ID och data för data för att utforska dess fulla potential!



































































































































