





Inom området för bil- och industriella tillämpningar är tillförlitlig kommunikation mellan flera mikrokontroller av största vikt. Controller Area Network (CAN) bussprotokoll har framkommit som en robust lösning för sådana behov. Det här blogginlägget fördjupar grunderna i CAN -bussprotokollet och visar hur man integrerar MCP2515 Can Controller med en Arduino, vilket möjliggör sömlös kommunikation i dina projekt.
Vad är kan bussprotokoll?
Controller Area Network (CAN) buss är en robust fordonsbussstandard som är utformad för att tillåta mikrokontroller och enheter att kommunicera med varandra utan värddator. Bus, som utvecklats av Bosch på 1980 -talet, har blivit en standard i bilsystem men används också allmänt i industriell automatisering och andra inbäddade system.
Viktiga funktioner i CAN -bussprotokollet inkluderar:
- Multi-Master-konfiguration: Flera noder kan kommunicera på samma buss utan en central styrenhet.
- Meddelandeprioritering: Meddelanden prioriteras baserat på deras identifierare, vilket säkerställer att kritiska data överförs först.
- Feldetektering: Robusta feldetekteringsmekanismer, inklusive CRC -kontroller och bekräftelsebitar, förbättrar tillförlitligheten.
- Höghastighetskommunikation: Stöder datahastigheter upp till 1 Mbps, lämpliga för realtidsapplikationer.
Dessa funktioner gör att bussbuss är idealisk för scenarier där flera enheter behöver kommunicera effektivt och pålitligt, till exempel i fordonsmotorhanteringssystem, industriell automatisering och robotik.
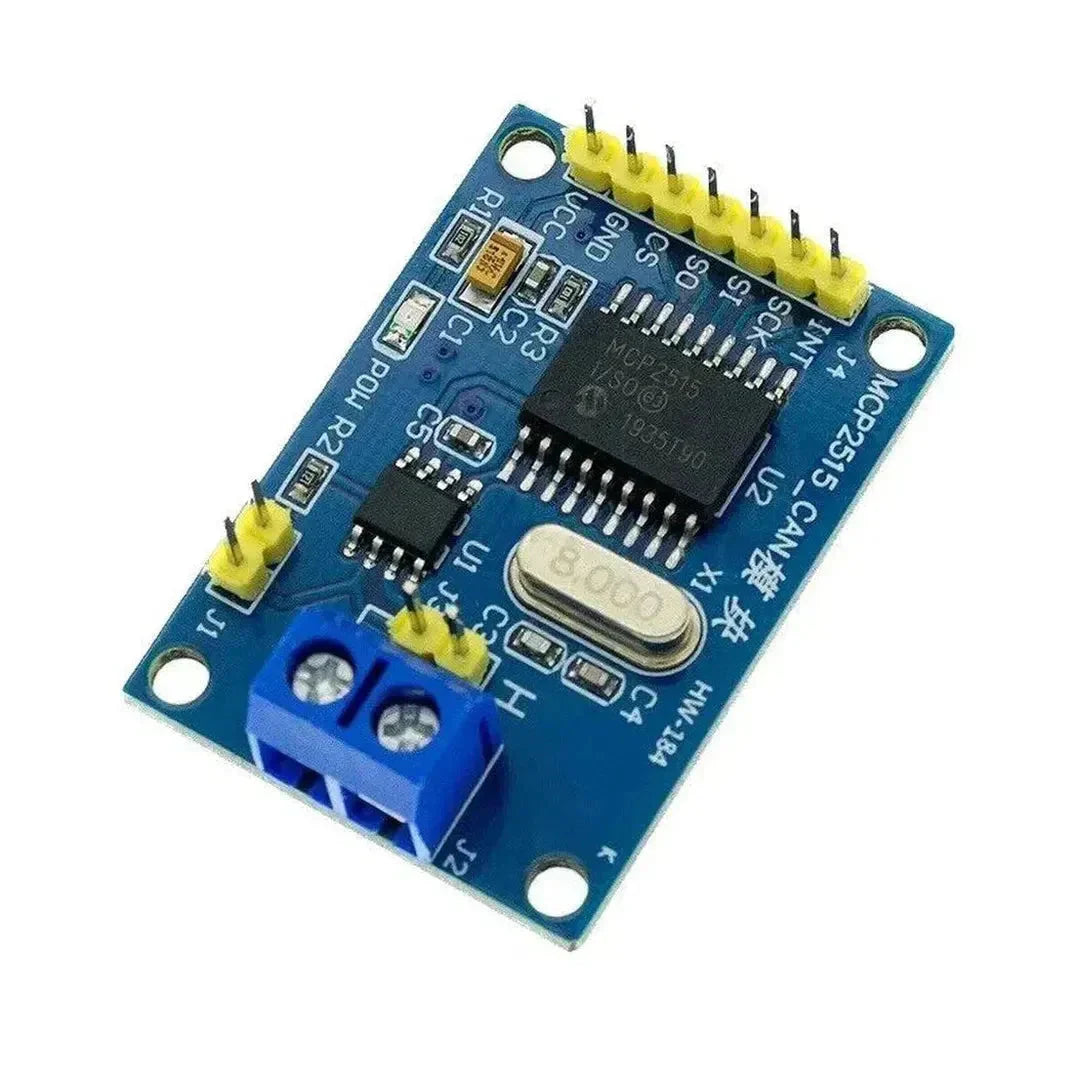
Introduktion av MCP2515 Can Controller
MCP2515 är ett fristående Controller Area Network (CAN) Controller som gränssnitt med mikrokontroller via det seriella perifera gränssnittet (SPI). Den hanterar det intrikata CAN-protokollet, vilket gör att utvecklare kan fokusera på applikationslogik på högre nivå. Viktiga funktioner i MCP2515 inkluderar:
- Stöd för standard och utökad kan ramar.
- Inbyggda felhantering och filtreringsmekanismer.
- Kompatibilitet med olika mikrokontroller, inklusive Arduino.
- Låg effektförbrukning, vilket gör den lämplig för inbäddade system.
Genom att integrera MCP2515 med en Arduino kan du lägga till CAN BUS-kapacitet till dina projekt, vilket möjliggör kommunikation med andra kan-aktiverade enheter eller nätverk.
Ställa in MCP2515 med Arduino
För att komma igång behöver du följande komponenter:
- Arduino Board (t.ex. Arduino UNO)
- MCP2515 kan modul (kommer ofta med en TJA1050 kan sändtagare)
- Bulttrådar
- Breadboard (valfritt)
Här är en steg-för-steg-guide för att ställa in MCP2515 med din Arduino:
1. Koppla av MCP2515 till Arduino
Anslut MCP2515 -modulen till Arduino enligt följande:
- Vcc till 5V på Arduino
- Gard till Gard på Arduino
- Cs till Stift 10 på Arduino
- Säck till Stift 13 på Arduino
- SI (Mosi) till Stift 11 på Arduino
- SÅ (Miso) till Stift 12 på Arduino
- Int till Stift 2 på Arduino
Arduino MCP2515
------- -------
5V ------> VCC
GND ------> GND
Pin 10 ------> CS
Pin 13 ------> SCK
Pin 11 ------> SI (MOSI)
Pin 12 ------> SO (MISO)
Pin 2 ------> INT
2. Installera de nödvändiga biblioteken
För att kommunicera med MCP2515 behöver du mcp_can bibliotek. Installera det via Arduino Library Manager:
- Öppna Arduino IDE.
- Navigera till Skiss> Inkludera bibliotek> Hantera bibliotek ...
- Leta efter mcp_can och installera mcp_can Bibliotek av Cory J. Fowler.
3. Ladda upp exempelkoden
Här är ett grundläggande exempel att skicka och ta emot CAN -meddelanden med MCP2515 och Arduino:
Skickar ett burkmeddelande
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
byte data[] = {0x00, 0xFF, 0xAA, 0x55, 0x33, 0x66, 0x99, 0xCC};
// Send data: CAN ID = 0x100, data length = 8
if (CAN0.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully!");
} else {
Serial.println("Error Sending Message...");
}
delay(1000);
}
Får ett burkmeddelande
// Include the necessary libraries
#include
#include "mcp_can.h"
// Define the CS pin
#define CAN0_CS 10
// Initialize the CAN controller
MCP_CAN CAN0(CAN0_CS);
void setup() {
Serial.begin(115200);
while (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
unsigned long canId;
byte len = 0;
byte buf[8];
// Check if data has been received
if (CAN0.checkReceive() == CAN_MSGAVAIL) {
CAN0.readMsgBuf(&canId, &len, buf);
Serial.print("CAN ID: 0x");
Serial.println(canId, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
I den sändande skissen överför Arduino ett burkmeddelande med ID 0x100 varannan. Den mottagande skissen lyssnar på inkommande burkmeddelanden och skriver ut ID och data till seriemonitorn.
Applikationer av buss med Arduino
Integrering av CAN -buss med Arduino öppnar upp en mängd applikationer utöver bilsystem. Några fall av populärt bruk inkluderar:
- Robotik: Aktivera kommunikation mellan flera motorstyrenheter och sensorer.
- Industriell automatisering: Underlätta datautbyte mellan olika maskiner och kontrollenheter.
- Hemmautomation: Anslut olika smarta enheter i ett enhetligt nätverk.
- System för datainsamling: Samla in och bearbeta data från flera sensorer effektivt.
Slutsats
CAN -bussprotokollet, med dess tillförlitlighet och effektivitet, fungerar som en ryggrad för kommunikation i många inbäddade system. Genom att använda MCP2515 Can Controller med en Arduino kan utvecklare enkelt integrera CAN -bussförmågan i sina projekt. Oavsett om du arbetar med fordonssystem, industriell automatisering eller komplex robotik, förståelse och utnyttjande kan buss avsevärt förbättra ditt systems kommunikationsram.
Med de omfattande guiderna och exemplen som tillhandahålls är du väl utrustad för att gå in på att integrera Can-buss i ditt nästa Arduino-projekt. Glad kodning!

















































































































































